
机械手的功能主要就是通过对人体手臂进行模拟仿真,从而代替手工进行劳动作业,其工作模式主要是通过编程编制好固定的控制语言从而进行下一步的动作执行,目前机械手的控制核心主要采用PLC,执行元件可分为:液压传动、气动传动,并且根据具体使用工况也可分为通用性机械手和专门定制的非标型机械手,其运动轨迹也是各种各样的根据其目前功能上可分为点动或者连续轨迹运行的机械手,其主要目的都是将复杂的手工劳作转变成机械手自动工作,其很大程度上能够减少工况环境对于人身的伤害,并且减少人工操作的工作量,被广泛应用到机械制造、冶金、电机、国防军工等各个方面。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件,并且随着自动化的发展以及物流行业的需要,传统人工辅助生产线作业方式已经不能满足目前生产效率的需求,因此为了打造自动化的生产车间需要将传统设备进行柔性组合,提高生产作业效率,
国外对于机械手的研究已经比较早了,其工业发展快、发展时间早,并且国外对于劳动力的需求相比我国要更加紧缺,因此工业生产环境将国外更多的精力投入到如果提高生产效率以及如果减少人工使用的方向,因此国外机械手发展相对较早并且已经形成了众多知名品牌比如:ABB、酷卡等,其先进的视觉处理能力以及手臂关节的多轴运动,并配以先进的控制处理系统使得国外机械手得发展相比国内都更加先进。
国内方面目前我国自动化设备技术发展程度比较高,而大部分工作任然式人工装卸为主,其劳动输出要求大、效率不高并且人工作业无法保证装卸精度、设备操作危险性比价大,因此采用自动化的机械手已经成为设计发展趋势,提高作业生产效率并且提高工艺加工标准,将传统自动化设备发展成柔性的加工制造系统,对于我国未来长期的发展式非常必要的。
本课题通过对国内外机械手的应用与介绍,本根据目前国内流水线生产作业情况合理布局机械手的应用,并通过西门子编程软件完成其控制系统的核心内容,旨在配合生产线进行上下料取料作用,帮助人们解决传统人工装卸的情况。机械手对于国内外得发展来说都是一个新型得学科包括对机械手得控制、机械手得结构其是一个复杂系统的集合体,从机械手的发展随着时间的推移势必会发展到机器人的阶段,对于工业革命来说将会是一次大的突破。
目 录
前 言
1第一章 绪论
1.1国内外的背景
1.2 课题研究的意义
1.3 课题研究的内容
2第二章 控制系统设计方案
2.1 控制方案的主要内容
2.2 工艺控制流程
3第三章 系统的硬件设计
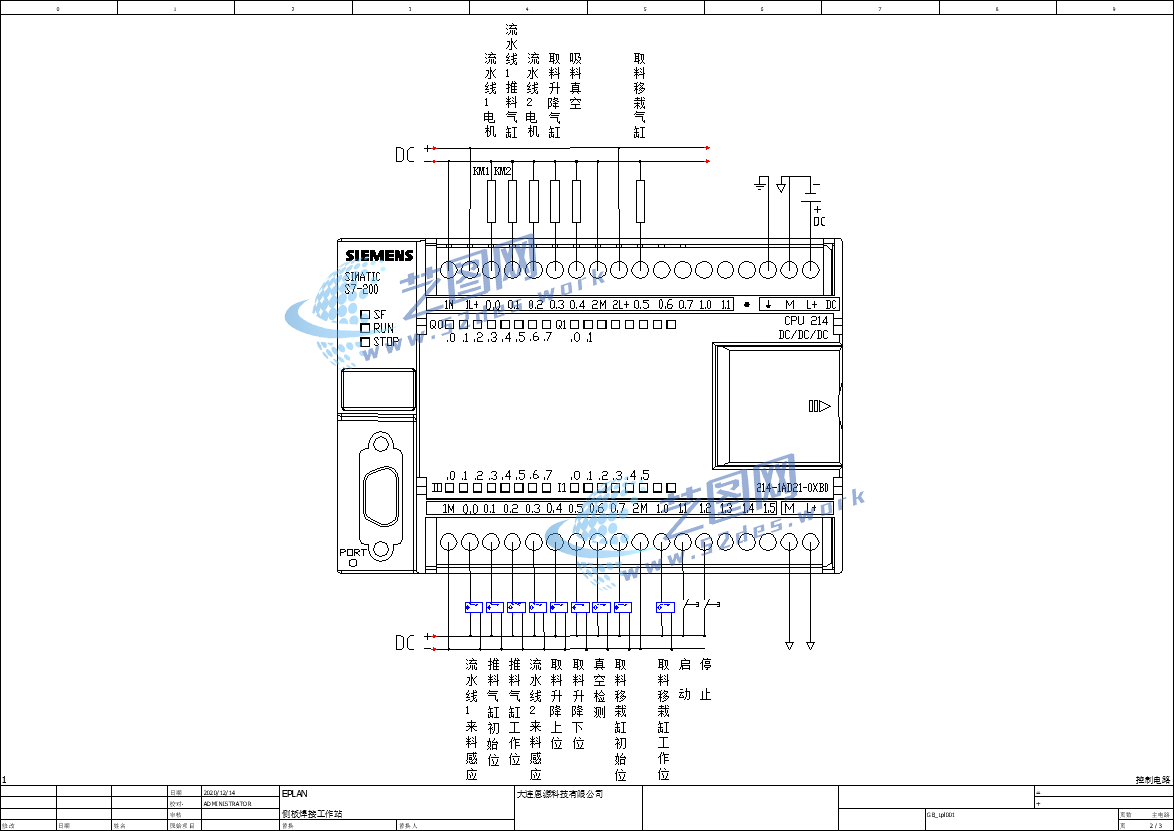
3.1 控制器介绍及选型
3.2 设计组成主要元器件的介绍
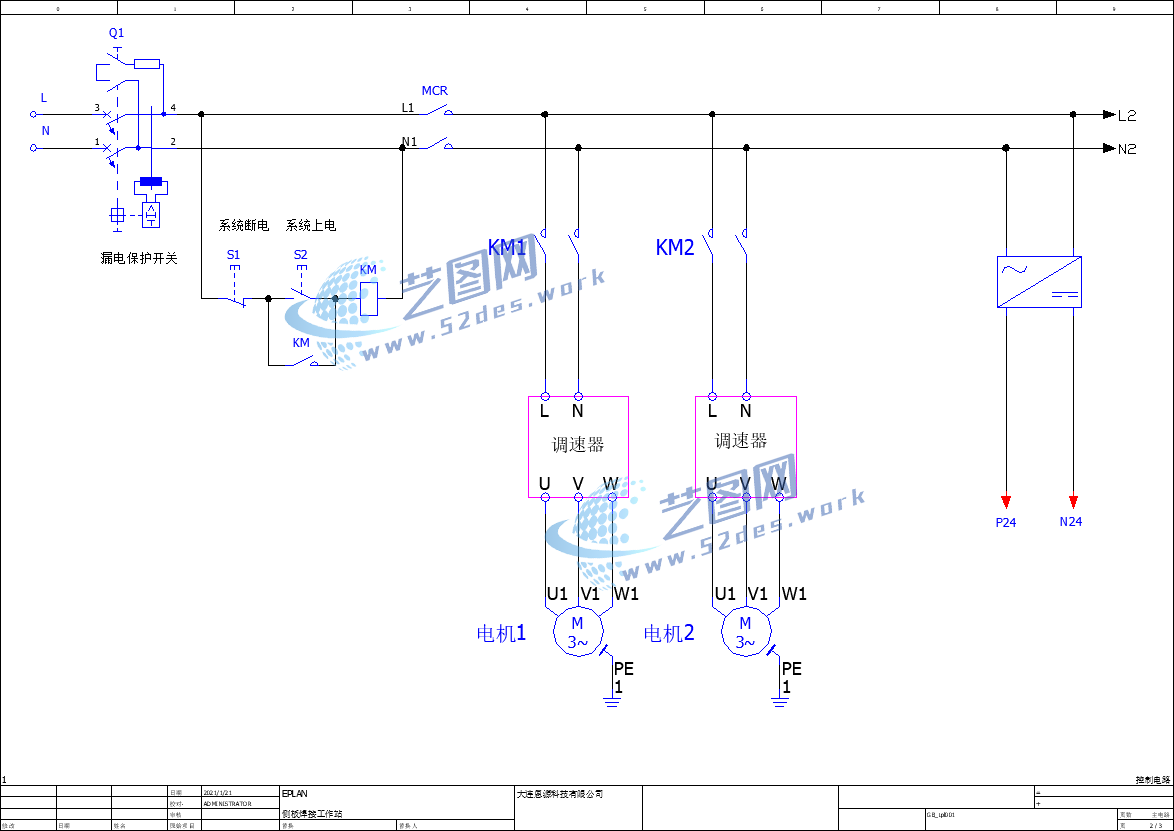
3.3 电气保护设计
3.5 绘制相关电气原理图
4第四章 系统的软件设计
4.1 STEP7编程软件介绍
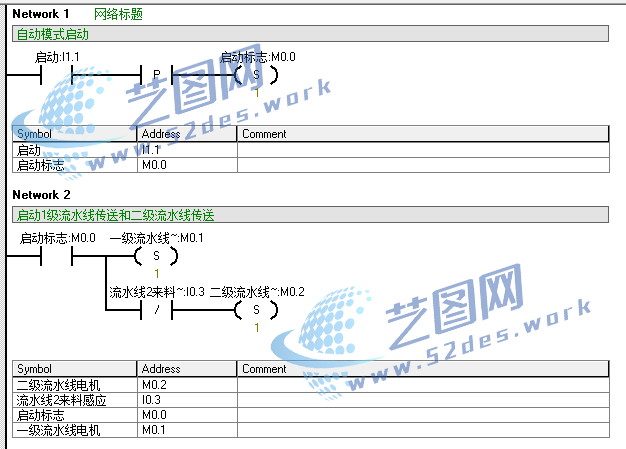
4.2 PLC编程方法的选择
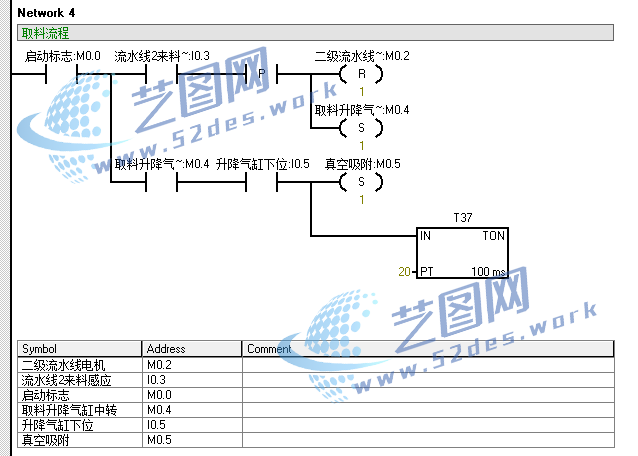
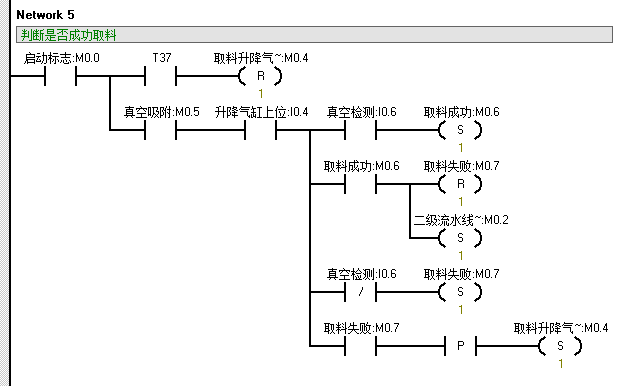
4.3 PLC程序设计
5第五章 程序调试与仿真
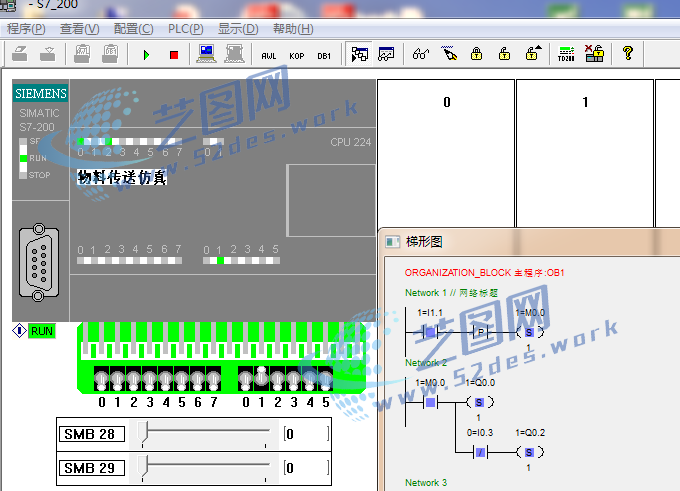
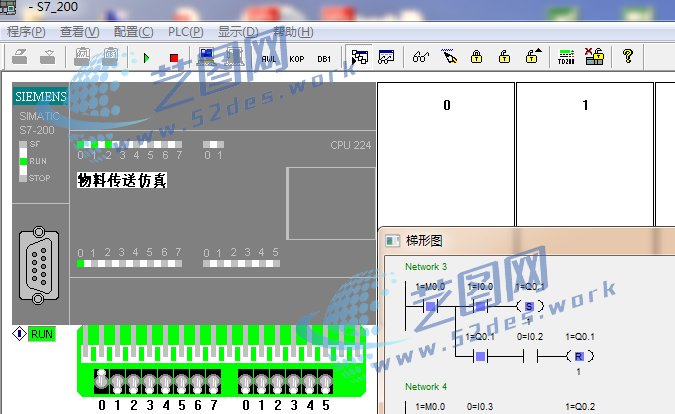
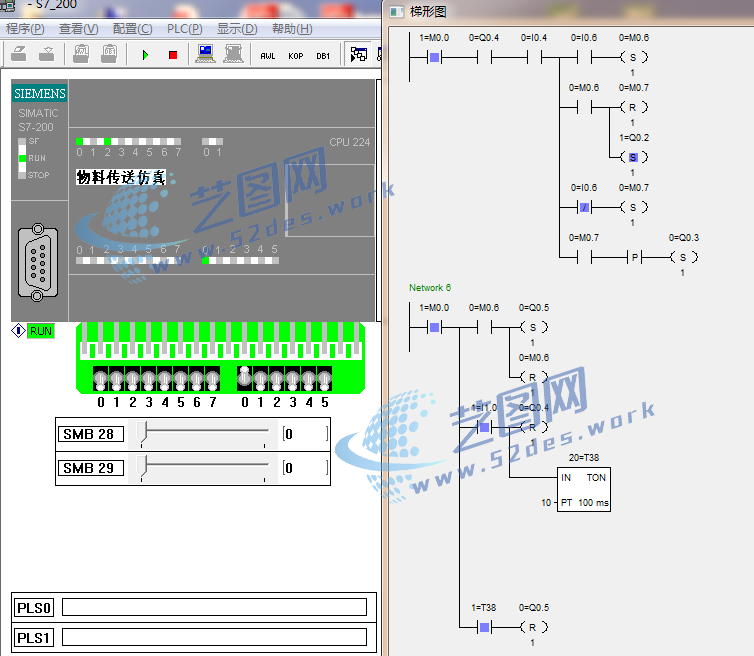
5.1 PLC程序仿真软件介绍
5.2 系统仿真测试
结 论
致 谢
参考文献
