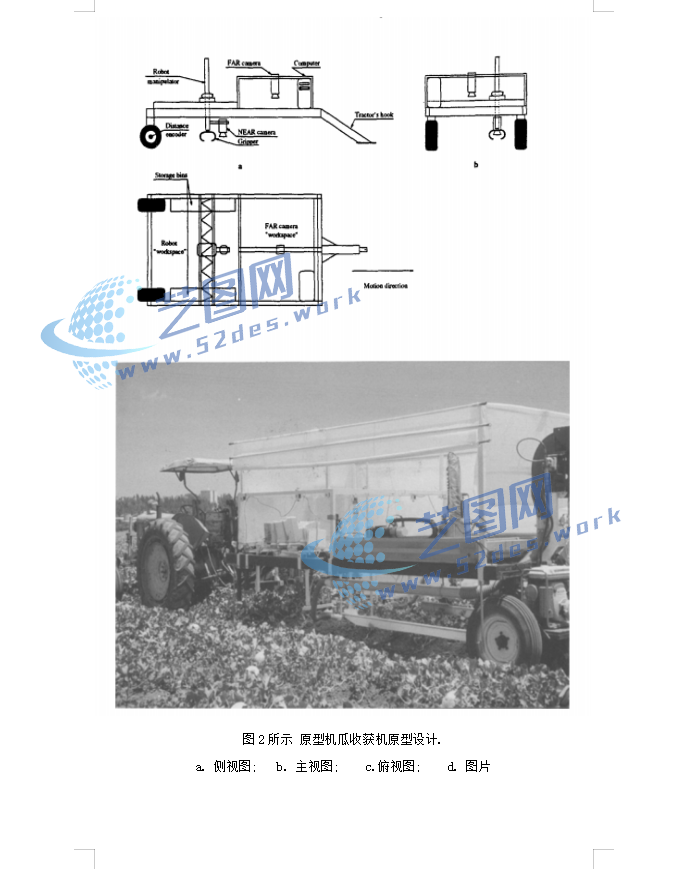
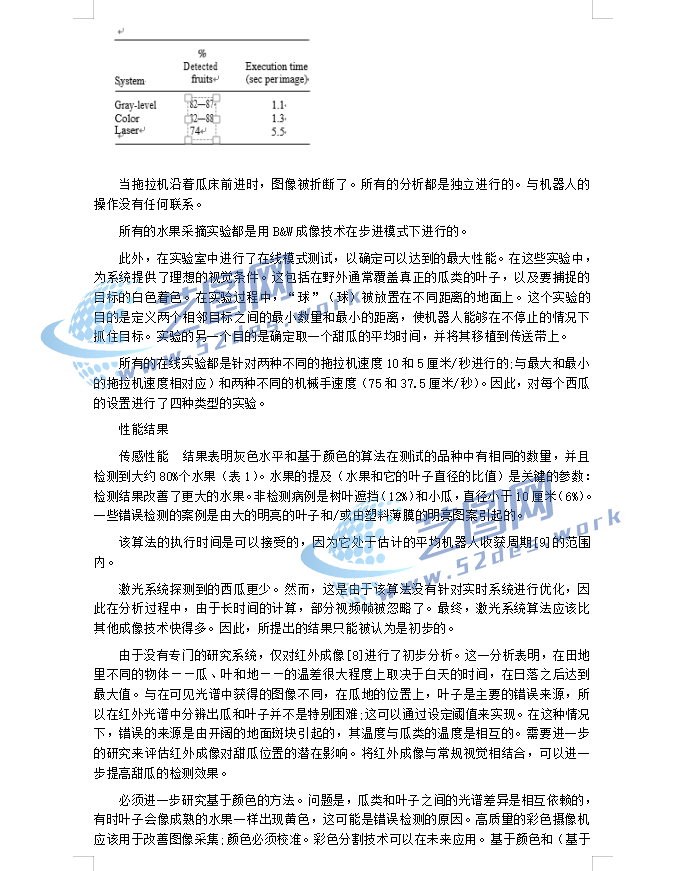
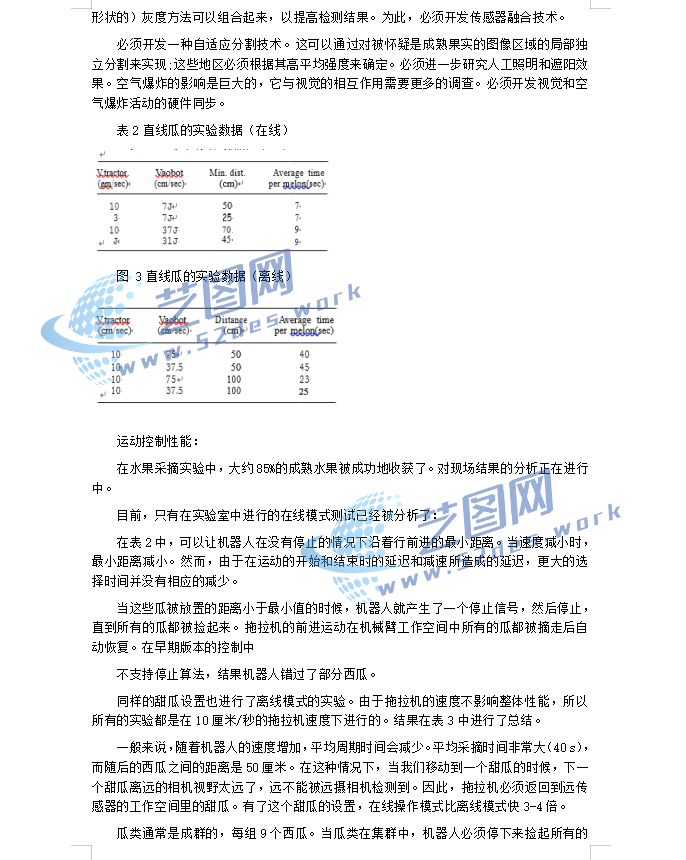
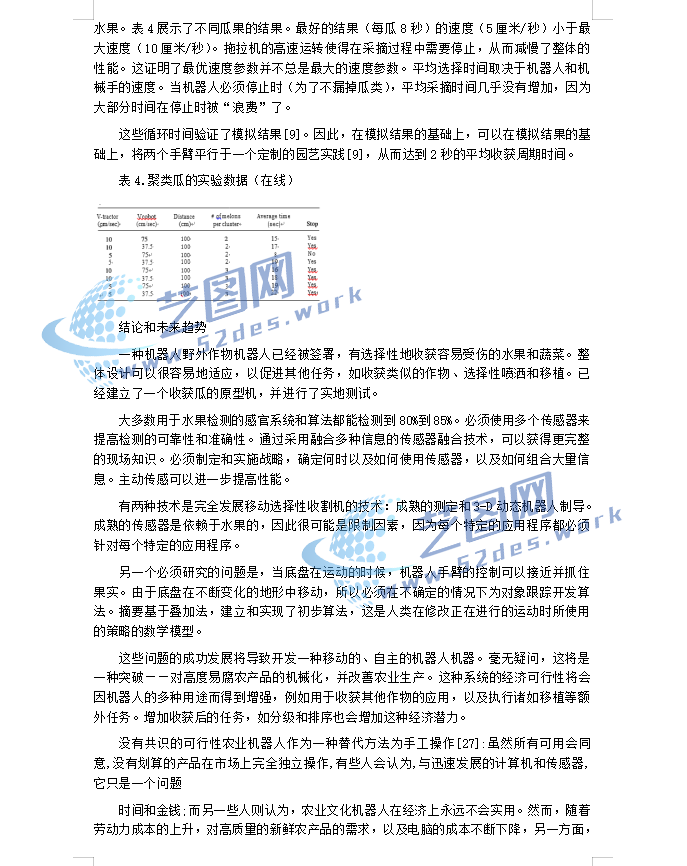
本文对自主农业机器人的发展进行了最先进的综述,包括制导系统、温室自动系统和水果采集机器人。本文设计了一种野外作物机器人机器选择性收获易损水果和蔬菜的一般概念。为了使机器人成为农业生产的可行选择,未来趋势必须采取自主农业机器人是重中之重。 一个模型机,含有这个设计的一部分,已经被实现了,用于甜瓜的收获。这台机器由一个安装在由拖拉机牵引的移动底盘上的笛卡尔机械手组成。两个视觉传感器被用来定位水果并引导机械手臂向它靠近。一个钳子夹住甜瓜,把它从藤上分离出来。实时控制一个由黑板系统组成硬件架构,其中包含了通过PC总线进行传感、计划和控制的自动模块。大约85%的水果成功地定位并收获了。 开题报告 说明书