仿生机械手solidworks18版本模型源文件仿生机械手solidworks18版本、三维模型零件预览图 仿生机械手solidworks18版本三维装配模型 仿生机械手solidworks18版本三维装配模型 仿生机械手设计借鉴了生物学中手部结构和运动原理,旨在实现更自然、灵活、精准的工业机械操作。这种机械手可能采用先进的传感器和控制系统,以模拟人类手部的多关节结构和手指灵活性。通过仿生学的设计理念,该机械手可以适应各种复杂任务,如精密组装、危险环境处理和医疗手术。综合运用先进的材料和工程技术,仿生机械手旨在提高工业自动化领域的效率和精度,同时拓展了机器人在人机交互和协作领域的应用。 三维模型

 仿生机械手solidworks18版本模型源文件
仿生机械手solidworks18版本模型源文件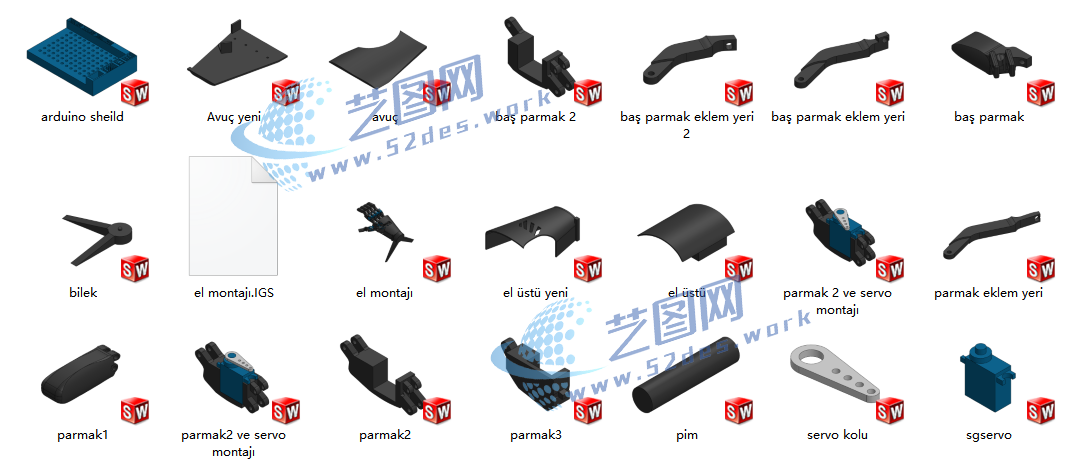 仿生机械手solidworks18版本、三维模型零件预览图
仿生机械手solidworks18版本、三维模型零件预览图  仿生机械手solidworks18版本三维装配模型
仿生机械手solidworks18版本三维装配模型 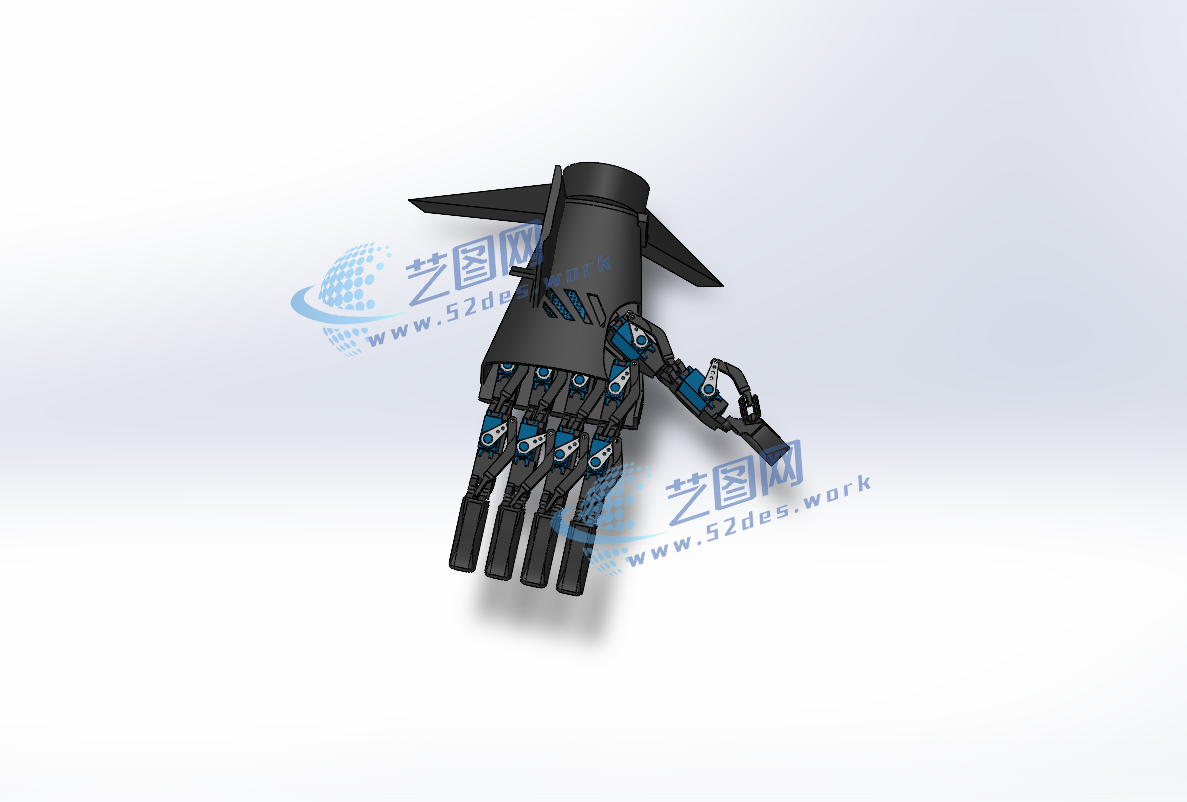 仿生机械手solidworks18版本三维装配模型
仿生机械手solidworks18版本三维装配模型 
