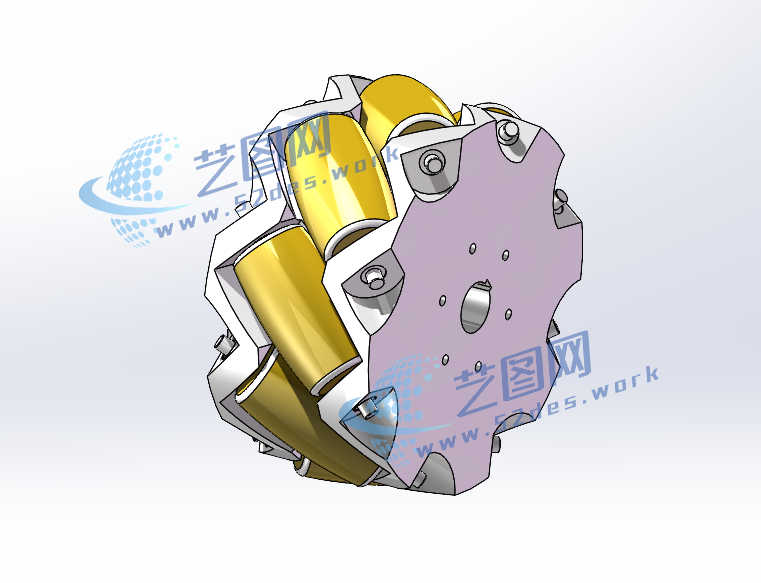
45°麦克纳姆轮solidworks16版本模型源文件45°麦克纳姆轮solidworks16版本三维装配模型 45°麦克纳姆轮solidworks16版本三维装配模型 45°麦克纳姆轮设计旨在提高机器人机动性。采用创新的45°排列方式,使机器人在水平和垂直方向上都能实现平滑的推进和旋转,最大程度地增强了机动性和精准操控性。轮辐结构精致轻巧,减少摩擦阻力,提高效率。由于麦克纳姆轮的独特设计,机器人可以在狭小空间内自由移动,完成复杂任务。整体设计考虑了稳定性和可靠性,为机器人在多样化环境中的灵活运动提供了可靠支持。 三维模型

 45°麦克纳姆轮solidworks16版本模型源文件
45°麦克纳姆轮solidworks16版本模型源文件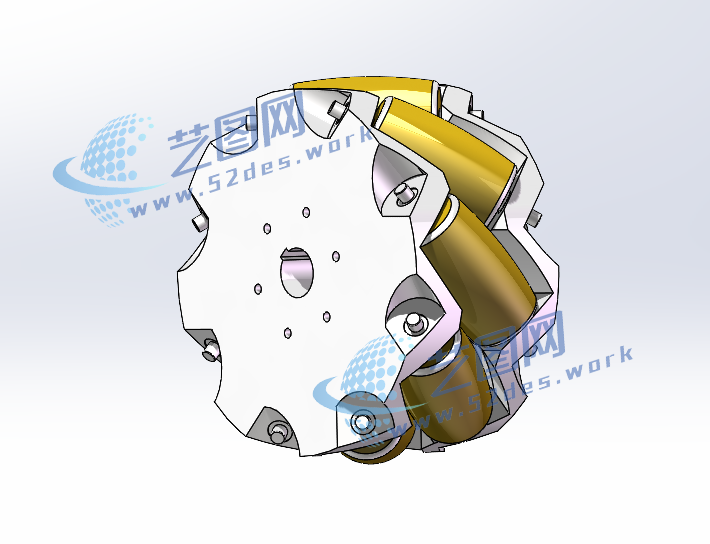 45°麦克纳姆轮solidworks16版本三维装配模型
45°麦克纳姆轮solidworks16版本三维装配模型  45°麦克纳姆轮solidworks16版本三维装配模型
45°麦克纳姆轮solidworks16版本三维装配模型