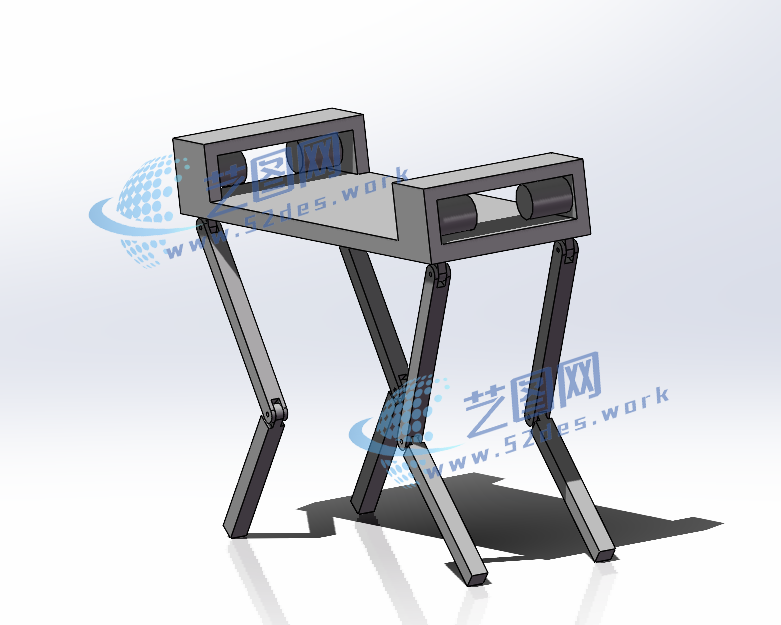
四足机器人solidworks13版本模型源文件四足机器人solidworks13版本、三维模型零件预览图四足机器人solidworks13版本三维装配模型 四足机器人solidworks13版本三维装配模型 四足机器人设计以实现高效稳定移动和多样化任务为目标。采用先进的传感器和运动控制技术,确保机器人能够适应不同地形和环境。强大的动力系统和智能算法使得四足机器人具备灵活的运动能力,可以步行、奔跑、攀爬等。机器人身体结构坚固而轻巧,整合了自平衡技术,提高了稳定性。可编程的控制系统使得四足机器人可以执行各种任务,包括巡逻、搜救、物品搬运等,为多领域的应用提供了创新性解决方案。 三维模型

 四足机器人solidworks13版本模型源文件
四足机器人solidworks13版本模型源文件 四足机器人solidworks13版本、三维模型零件预览图
四足机器人solidworks13版本、三维模型零件预览图 四足机器人solidworks13版本三维装配模型
四足机器人solidworks13版本三维装配模型 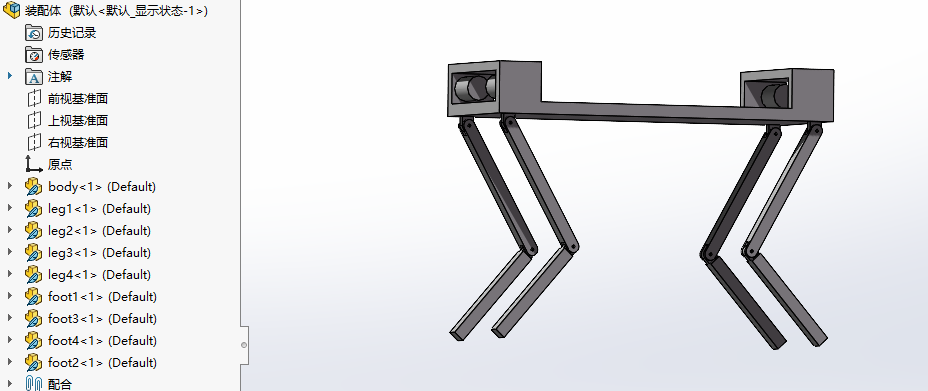 四足机器人solidworks13版本三维装配模型
四足机器人solidworks13版本三维装配模型