
文件内容:solidworks21三维模型、CAD图纸、设计说明书 电动机械手爪solidworks21版本模型源文件,可编辑,含参数
电动机械手爪solidworks21版本模型源文件,可编辑,含参数  电动机械手爪solidworks21版本、三维模型零件预览图
电动机械手爪solidworks21版本、三维模型零件预览图
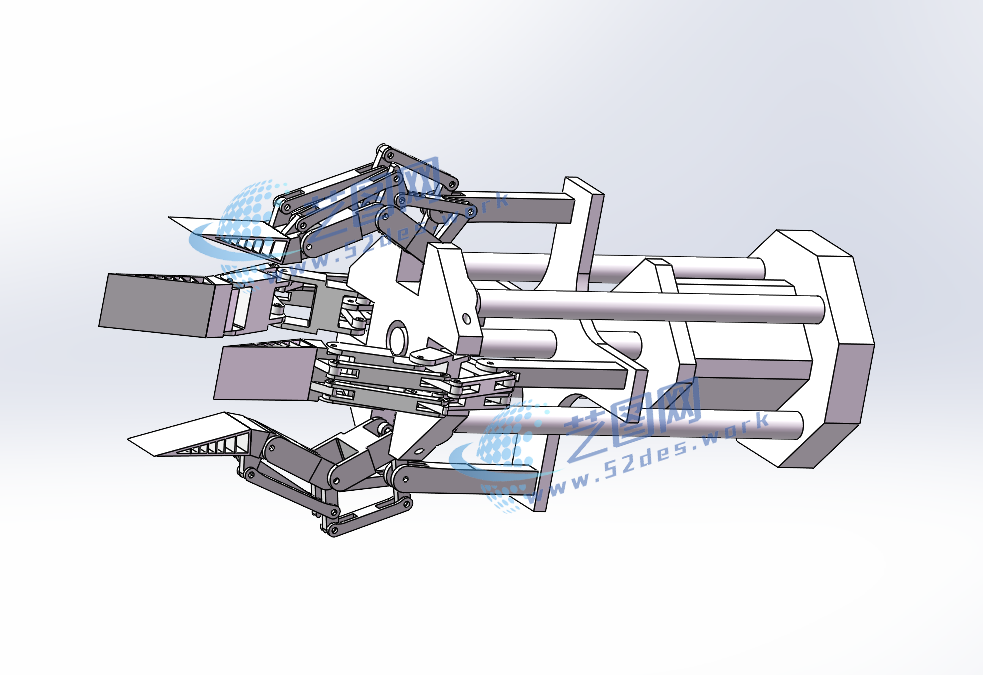
电动机械手爪solidworks21版本三维装配模型
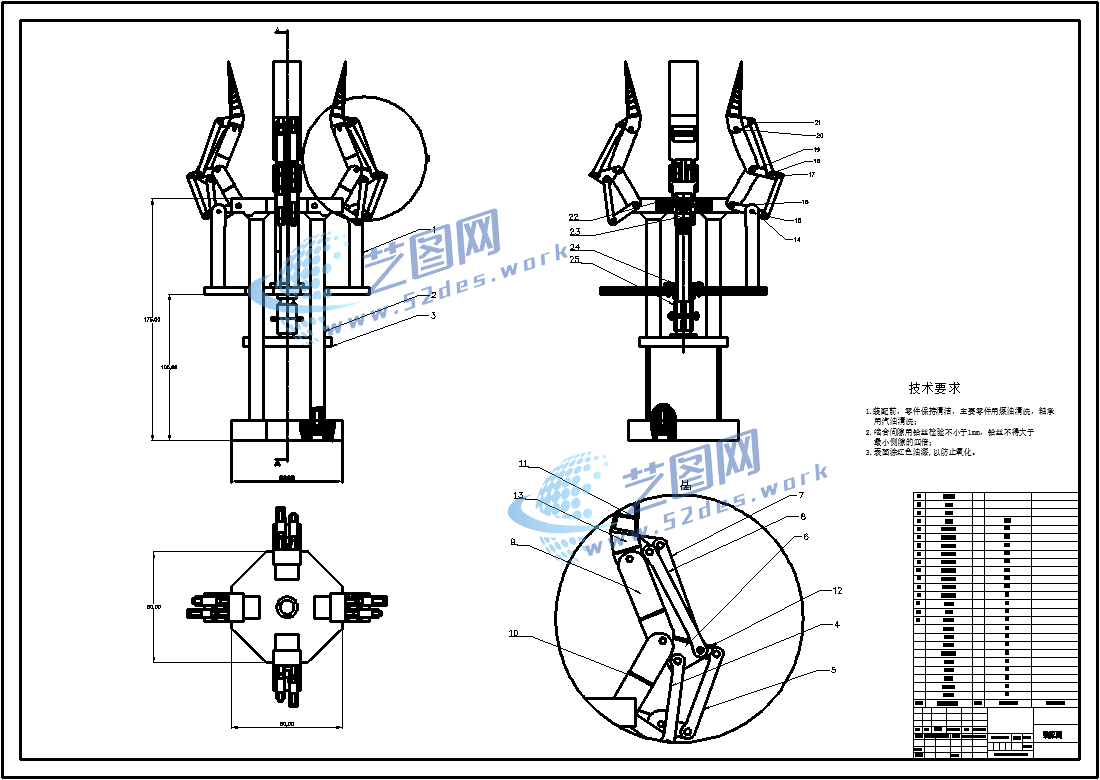
新国标CAD图纸:电动机械手爪设计装配图
该设计由四个具有高度自由度的柔性夹爪组成,它们是根据输入自由度和控制原则设计的。当柔性夹爪作为单个实体移动时,柔性夹爪的第一个手指关节突然不移动时,电动机的功率超过约束,旋转自由度将自动在第一节和第二节之间开始,第2关节与第3关节相互配合进行,其指尖通过柔性材料独立抓取,可实现快速抓取。
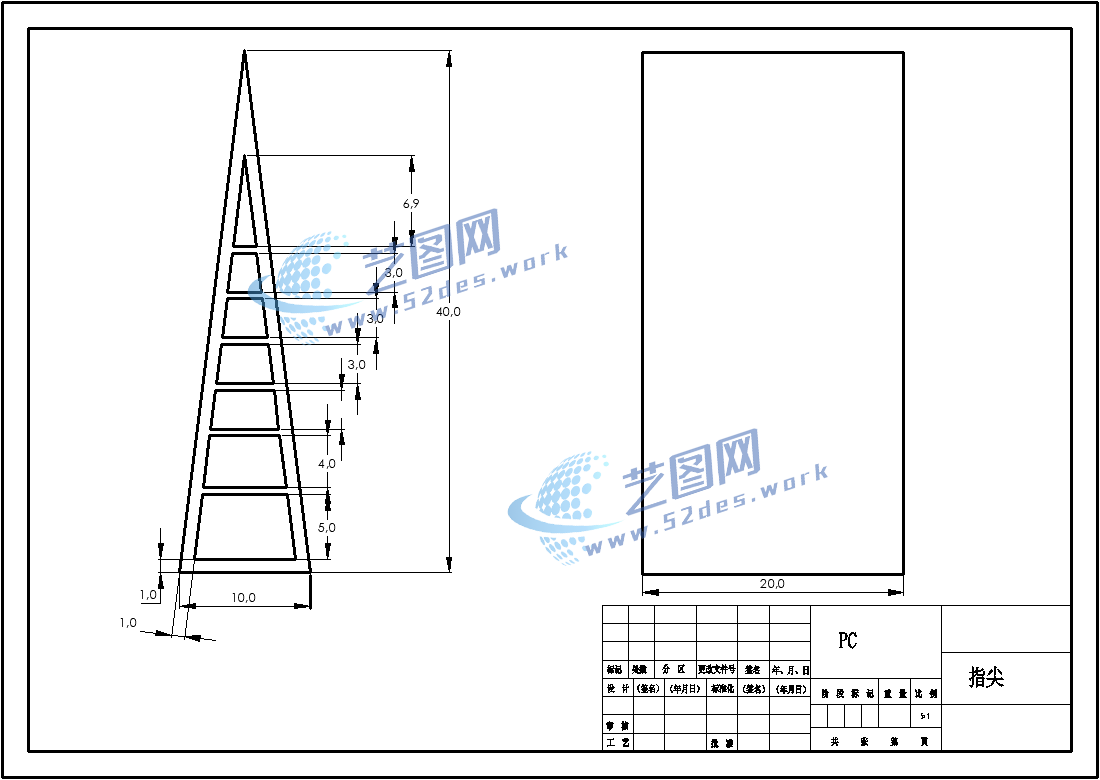
新国标CAD图纸:零件图 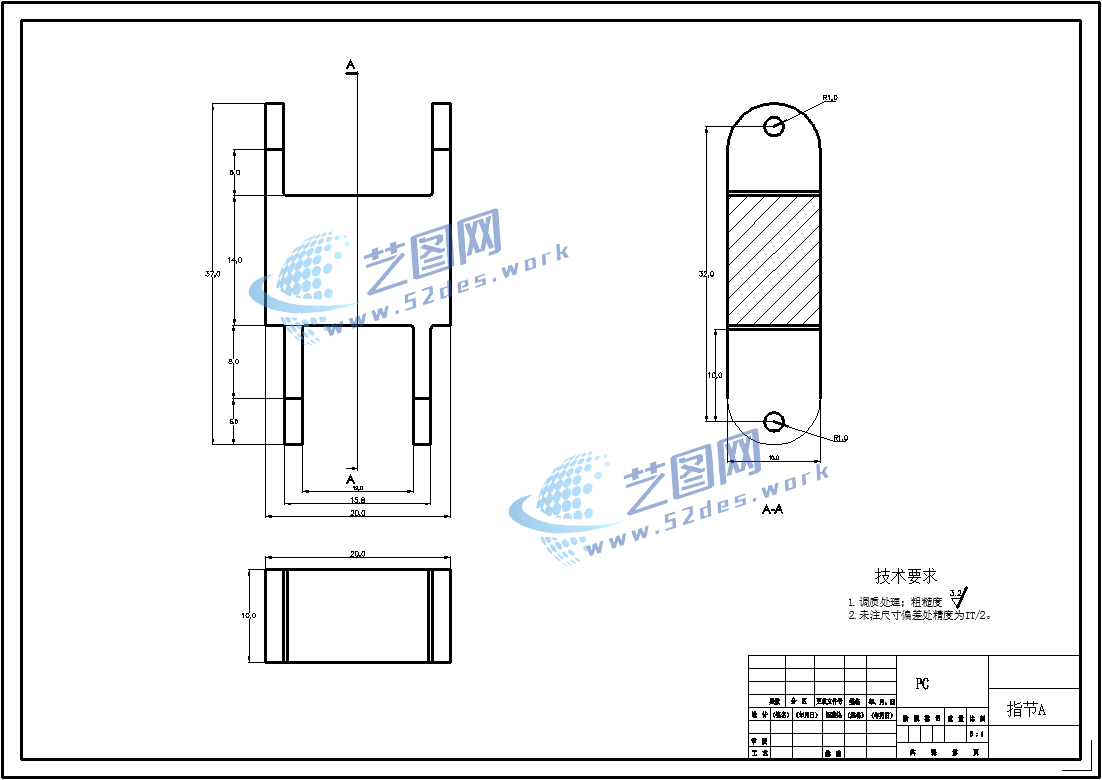
新国标CAD图纸:零件图 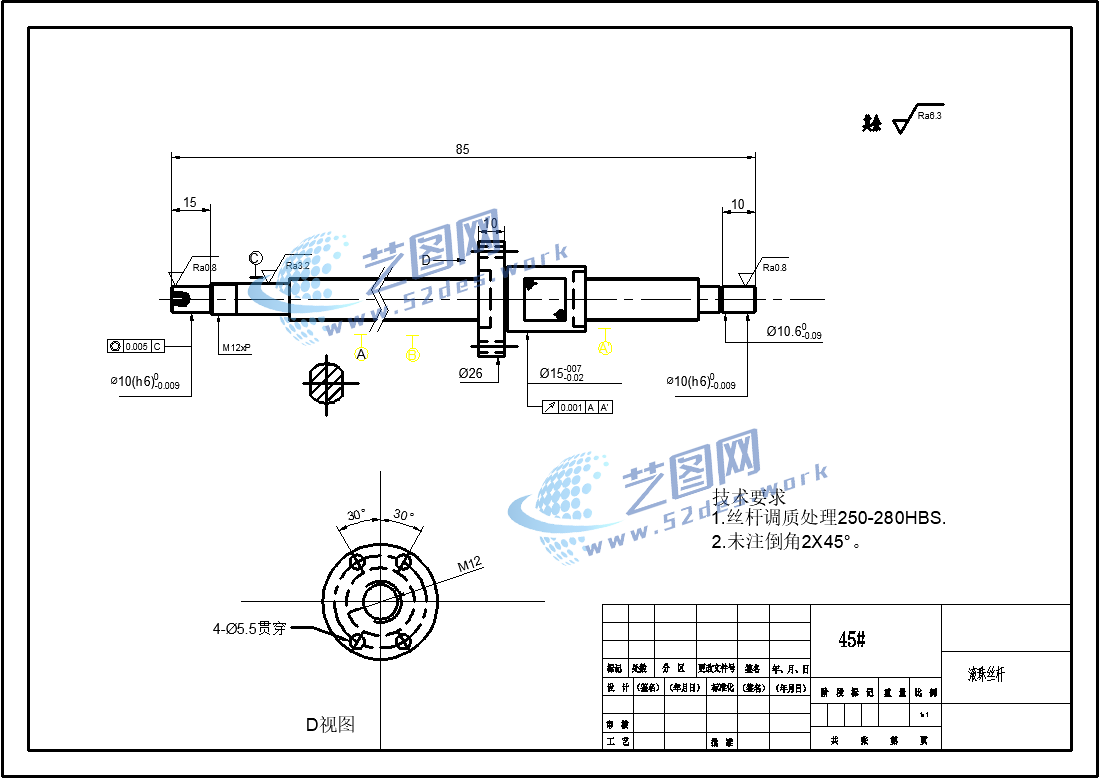
新国标CAD图纸:零件图 
电动机械手爪设计说明书目录
设计说明书目录
随着社会的进步,机械手在人类的生活中扮演越来越重要的角色,但是传统的机械手因为刚性大,不利于一些软质表面物体的夹取,柔性夹爪因此而诞生。该设计由四个具有高度自由度的柔性夹爪组成,它们是根据输入自由度和控制原则设计的。当柔性夹爪作为单个实体移动时,柔性夹爪的第一个手指关节突然不移动时,电动机的功率超过约束,旋转自由度将自动在第一节和第二节之间开始,第2关节与第3关节相互配合进行,其指尖通过柔性材料独立抓取,可实现快速抓取。并使材料表面进行相应的弹性形变,以获得更好的附着力,从而更好的抓取物体。通过各个关节及各个连杆的相互配合,使整个机构达到柔性机械手的设计目的,又可以达到节能和降低电机设计容量的目的,从而减轻机构的负荷,提高动态性能。并利用三维软件进行建模处理,并对其进行运动分析和仿真。
