
 采摘苹果机器人solidworks15版本模型源文件,可编辑
采摘苹果机器人solidworks15版本模型源文件,可编辑 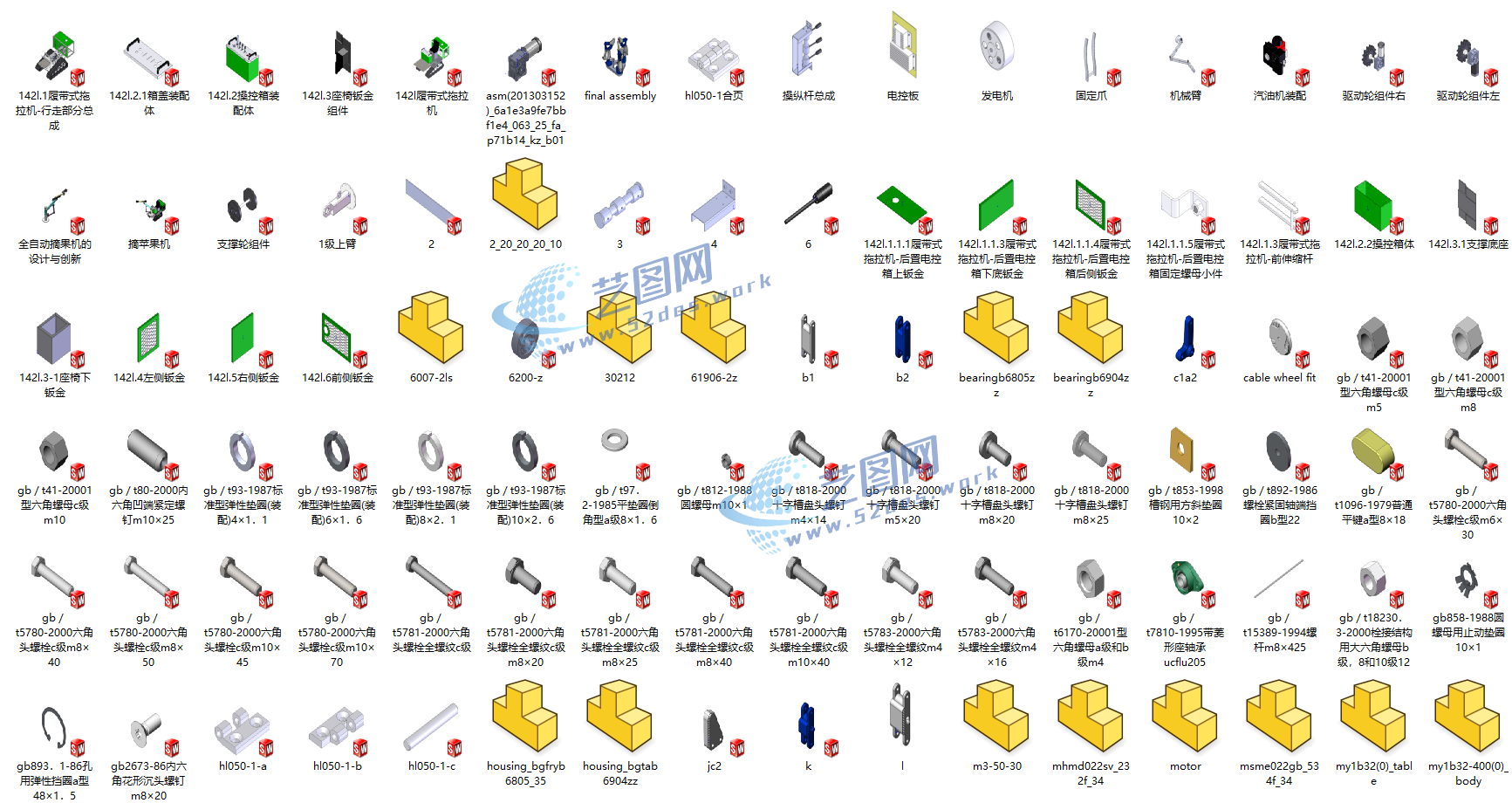
 采摘苹果机器人solidworks15版本、三维模型零件预览图
采摘苹果机器人solidworks15版本、三维模型零件预览图 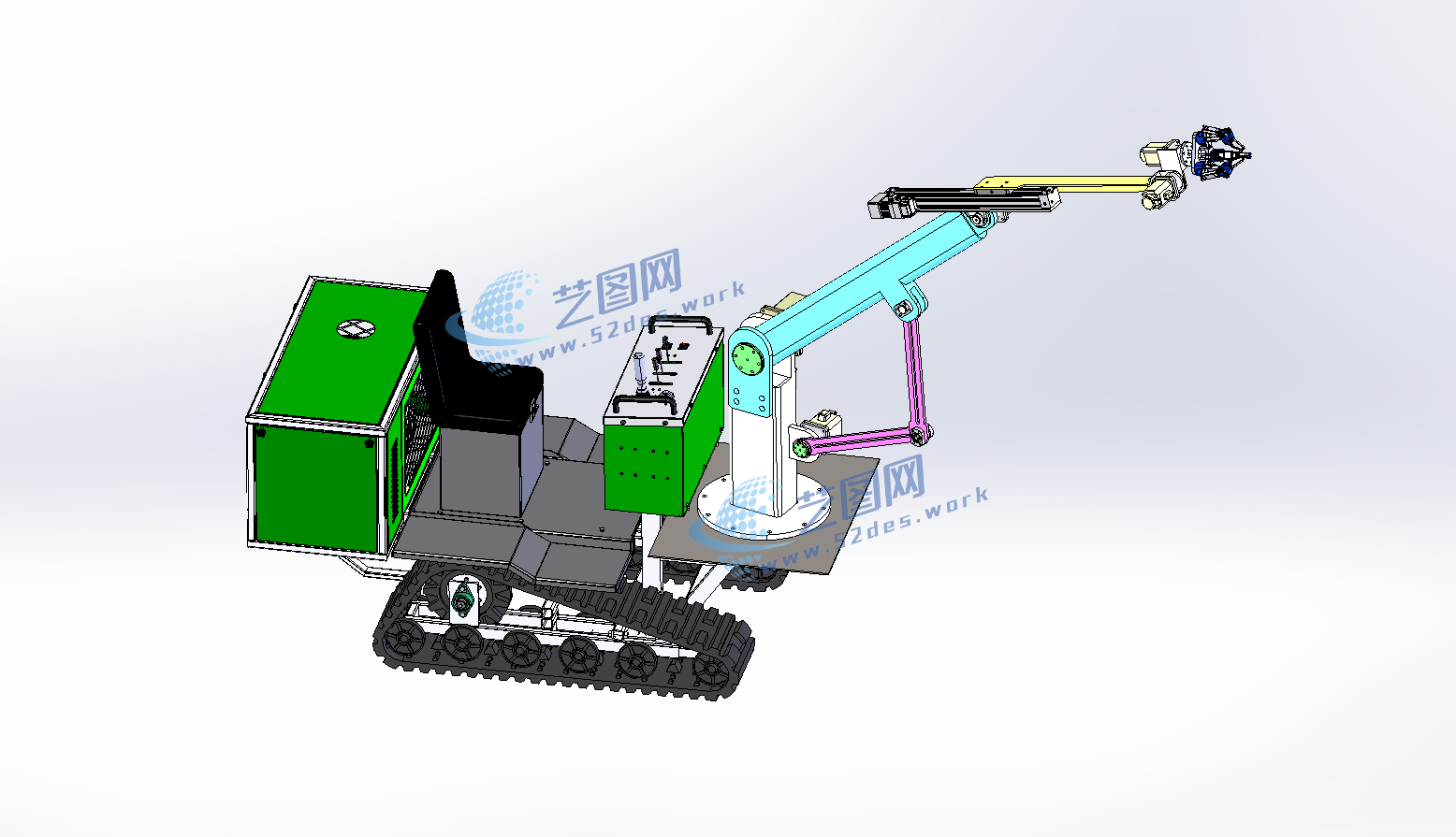 自动采摘苹果机器人solidworks15版本三维装配模型
自动采摘苹果机器人solidworks15版本三维装配模型
 自动采摘苹果机器人solidworks15版本三维装配模型
自动采摘苹果机器人solidworks15版本三维装配模型
 自动采摘苹果机器人solidworks15版本三维装配模型
自动采摘苹果机器人solidworks15版本三维装配模型
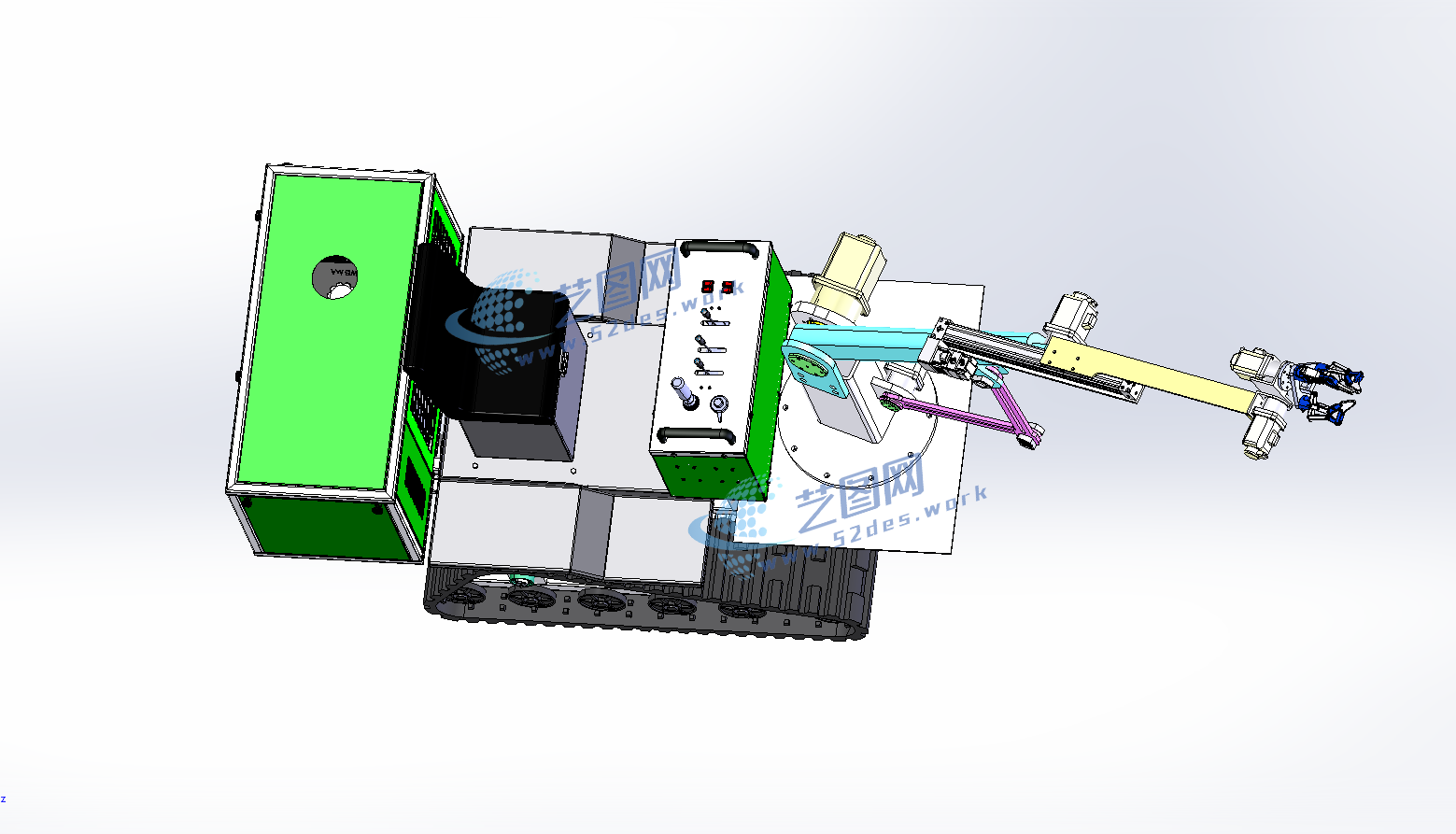
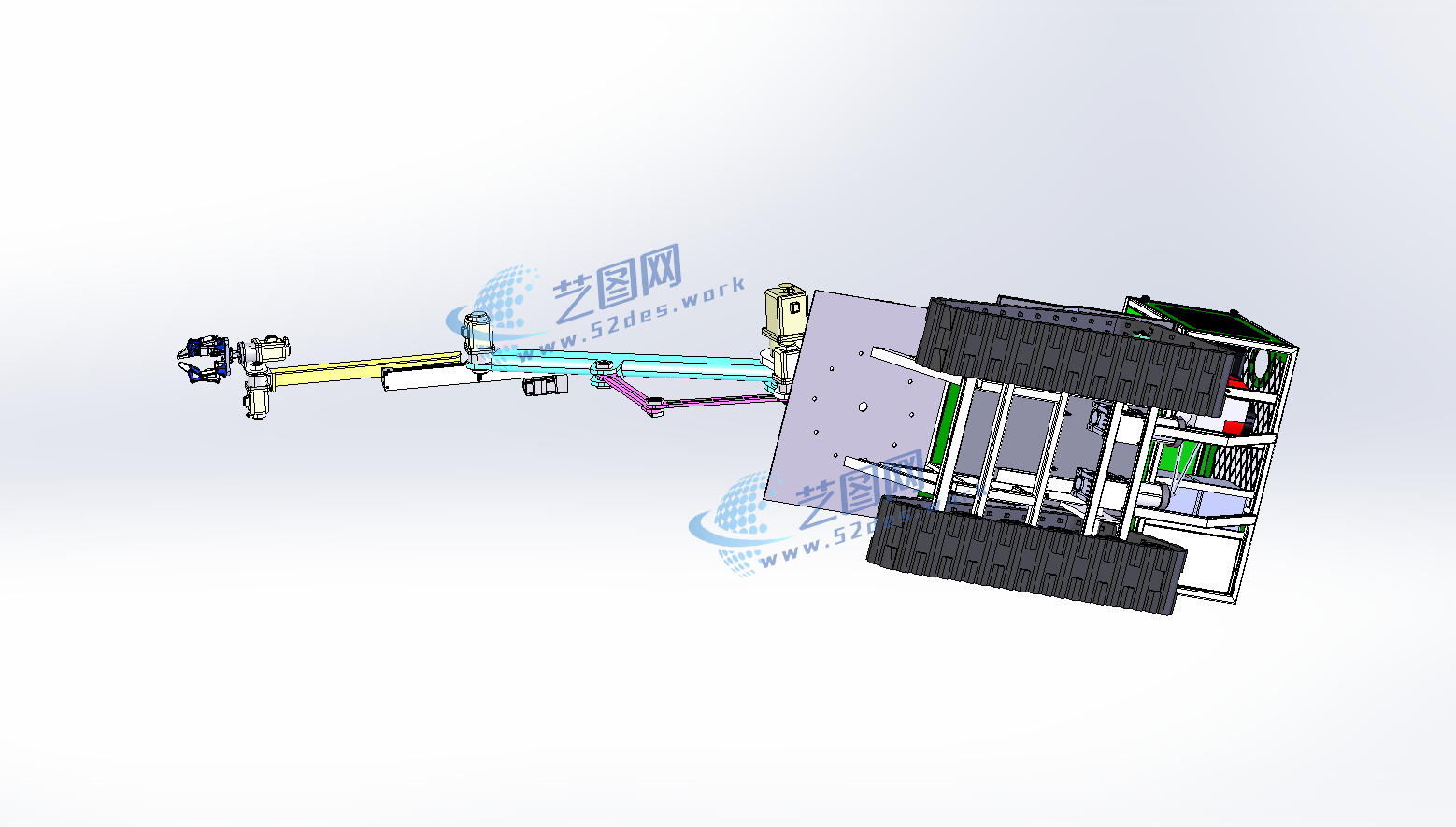
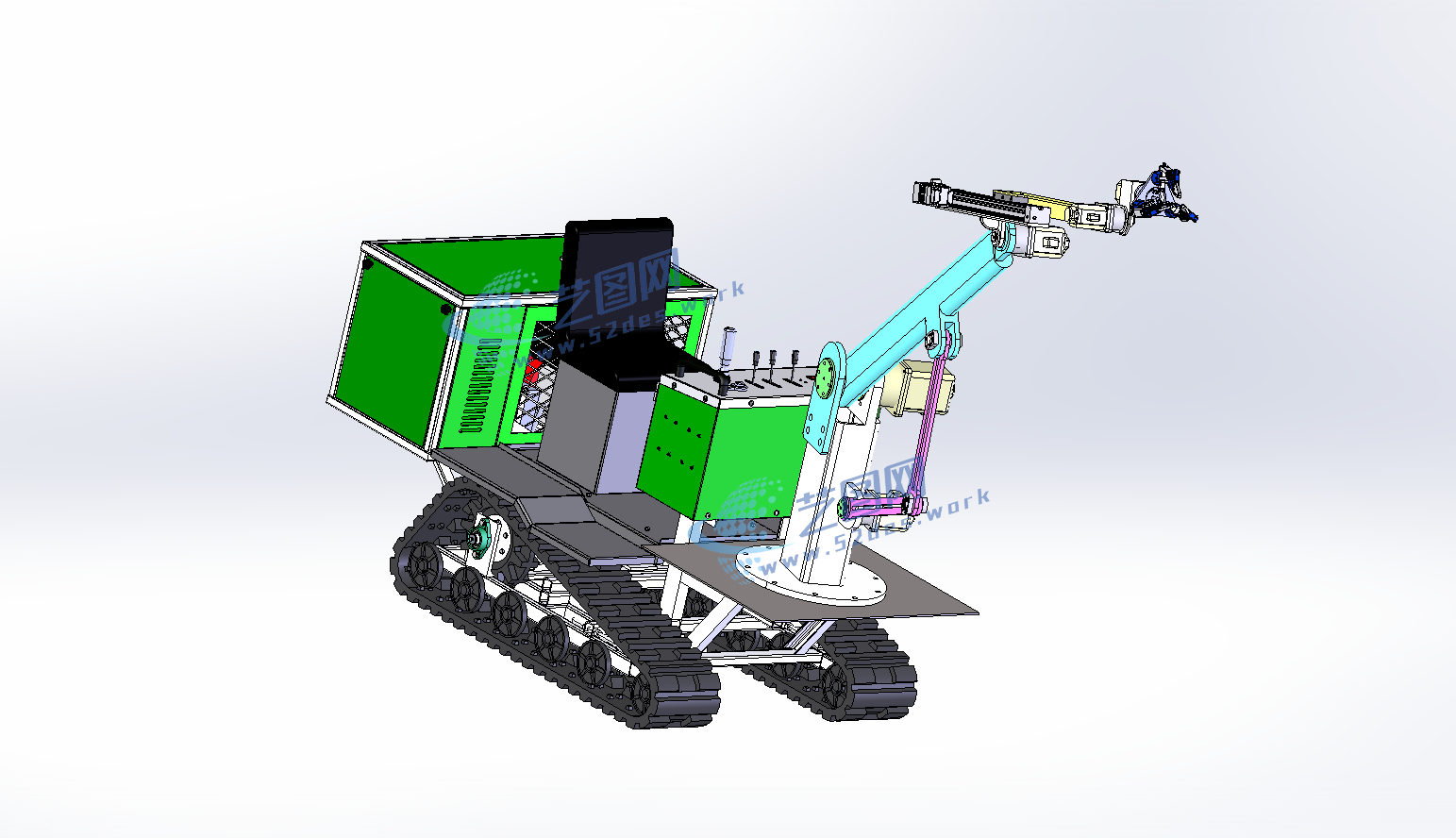 采摘苹果机器人solidworks15版本三维装配模型
采摘苹果机器人solidworks15版本三维装配模型 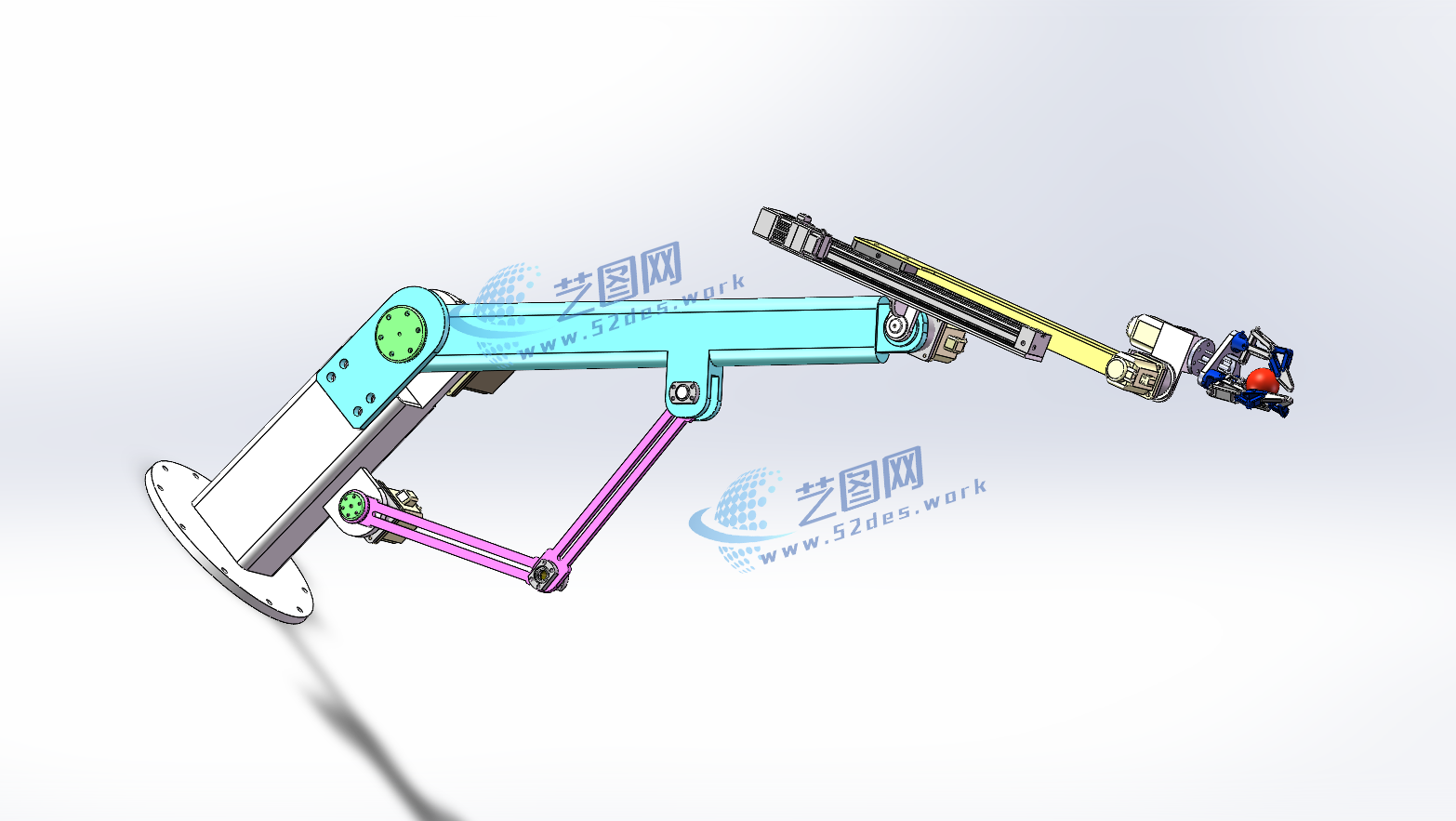
采摘苹果机器人通常由以下主要部分组成:首先是底盘,底盘上配备有轮子或履带以实现机器人在果园内的移动。机器人的结构还包括机械臂,该臂具有夹取和摘取苹果的装置,通常是一个夹爪或吸盘系统。传感器系统用于感知苹果的位置、成熟度和果树的布局,以便机器人可以精确选择和采摘成熟的苹果。控制单元负责处理传感器数据、执行机械臂的动作和控制机器人的移动路径。这种结构的采摘苹果机器人旨在提高果园的生产效率,减少采摘过程中的人工劳动,确保采摘的苹果质量和产量。
