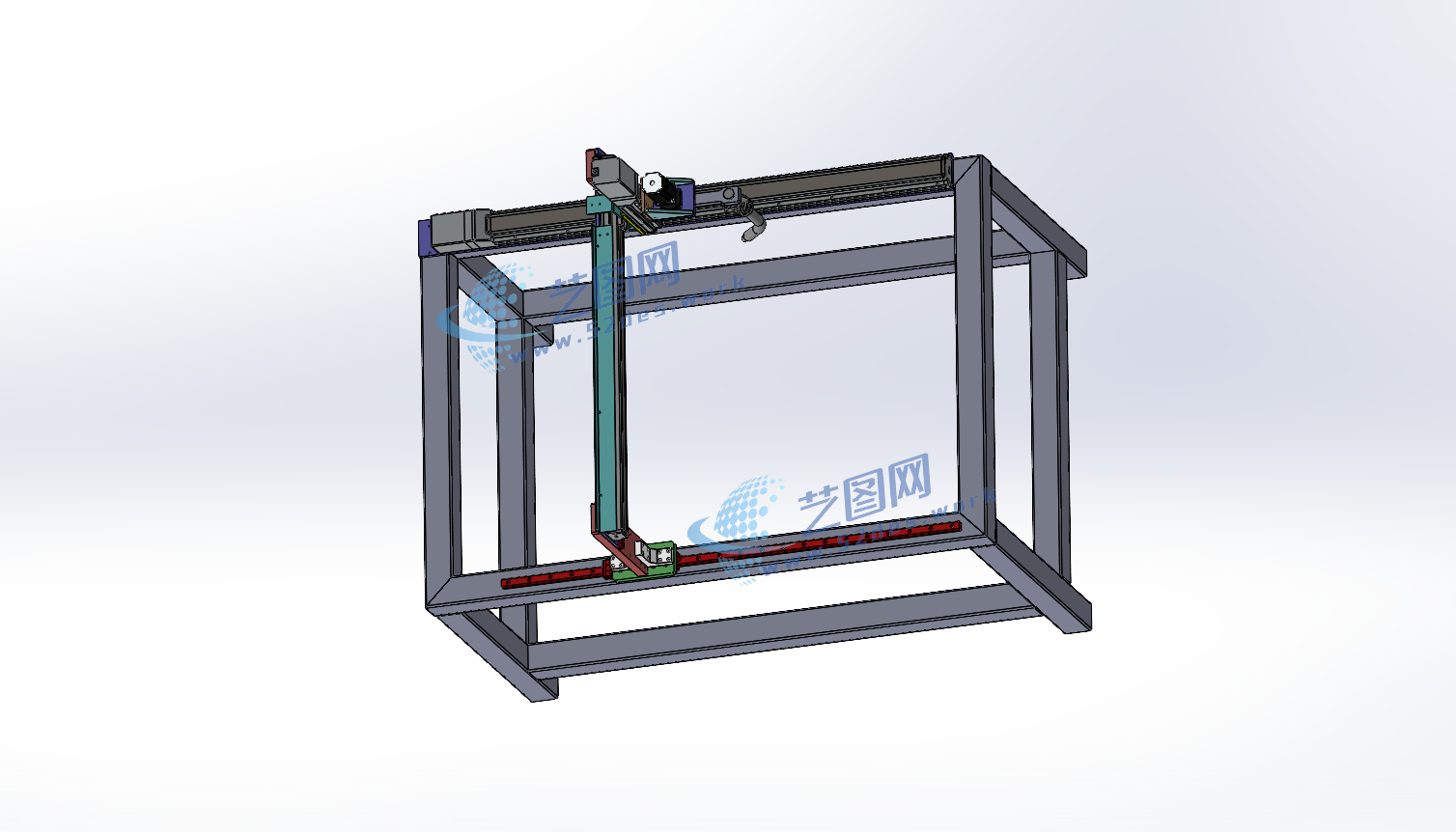
四轴焊接机器人solidworks17版本模型源文件,可编辑 四轴焊接机器人solidworks17版本、三维模型零件预览图 四轴焊接机器人solidworks17版本三维装配模型 四轴焊接机器人solidworks17版本三维装配模型 四轴焊接机器人solidworks17版本三维装配模型 四轴焊接机器人通常由以下主要部分组成:首先是底座,底座上安装有旋转座、支臂和焊接设备。旋转座使机器人能够在水平平面上旋转,支臂负责在垂直方向上移动。焊接设备通常包括焊枪、电源和控制系统,用于执行焊接操作。机器人的控制单元负责处理焊接参数、路径规划和动作控制,以确保高精度的焊接工作。 三维模型

 四轴焊接机器人solidworks17版本模型源文件,可编辑
四轴焊接机器人solidworks17版本模型源文件,可编辑 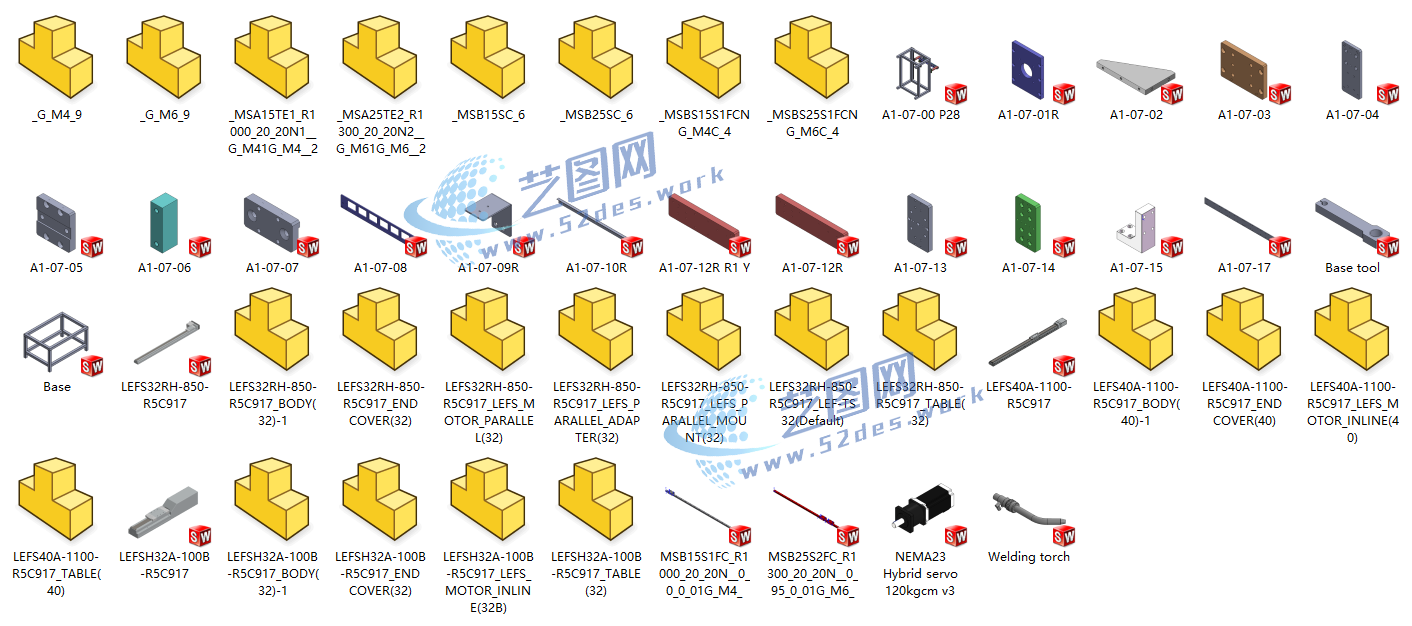 四轴焊接机器人solidworks17版本、三维模型零件预览图
四轴焊接机器人solidworks17版本、三维模型零件预览图 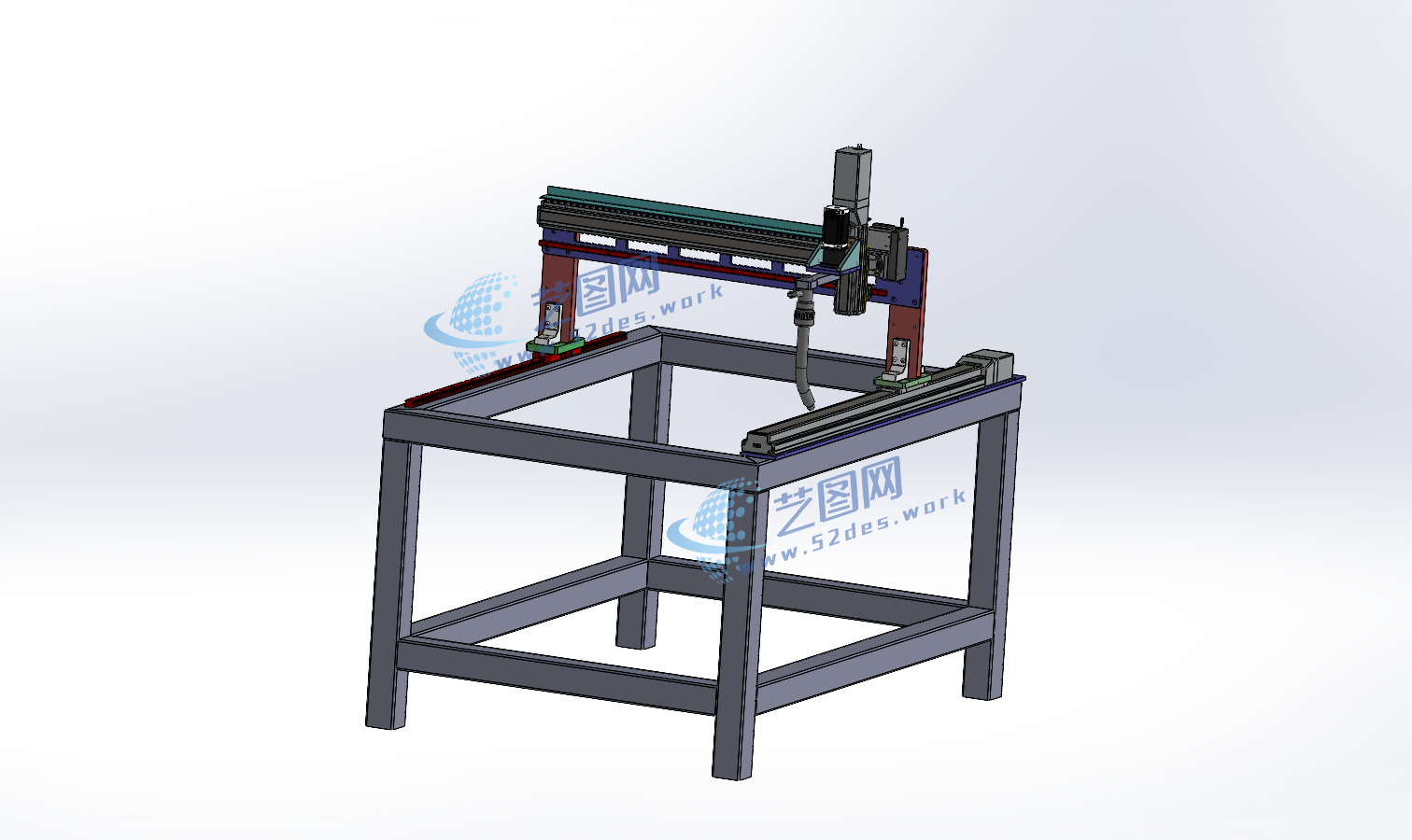 四轴焊接机器人solidworks17版本三维装配模型
四轴焊接机器人solidworks17版本三维装配模型 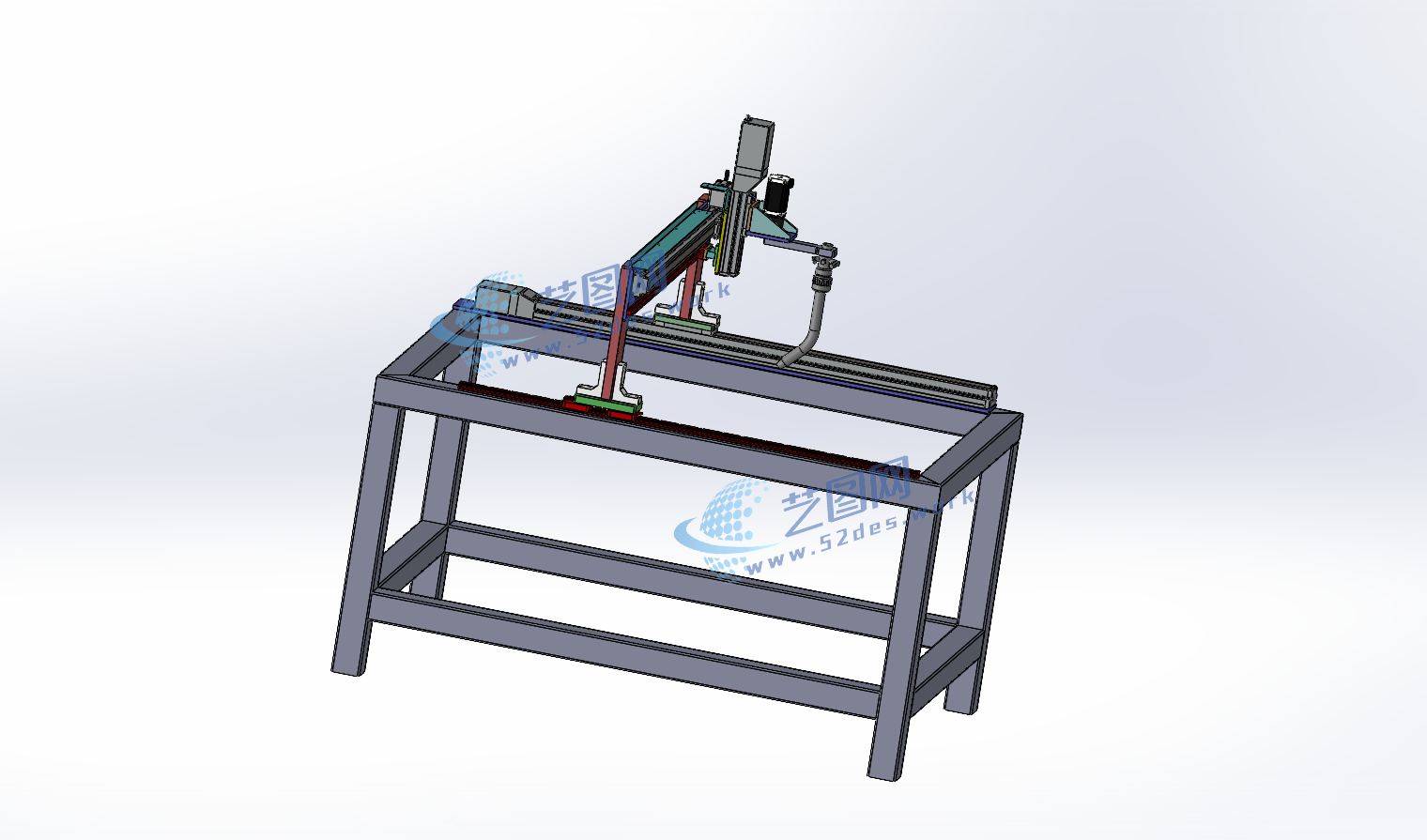 四轴焊接机器人solidworks17版本三维装配模型
四轴焊接机器人solidworks17版本三维装配模型 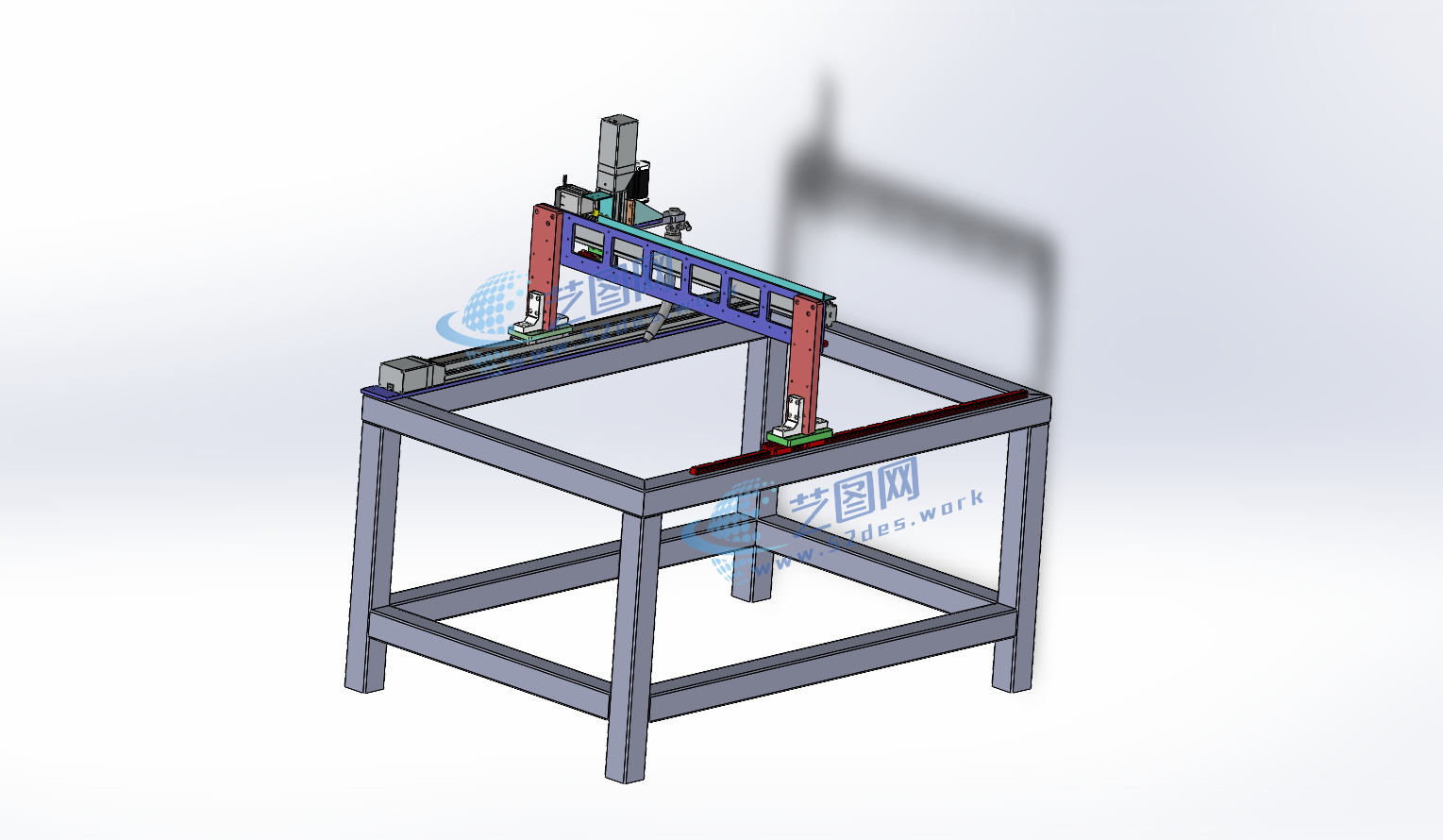 四轴焊接机器人solidworks17版本三维装配模型
四轴焊接机器人solidworks17版本三维装配模型