
 水下机器人solidworks16版本模型源文件,可编辑
水下机器人solidworks16版本模型源文件,可编辑  水下机器人solidworks16版本、三维模型零件预览图
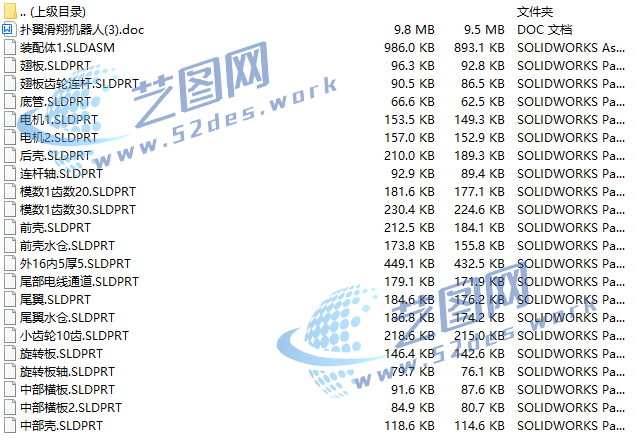
水下机器人solidworks16版本、三维模型零件预览图 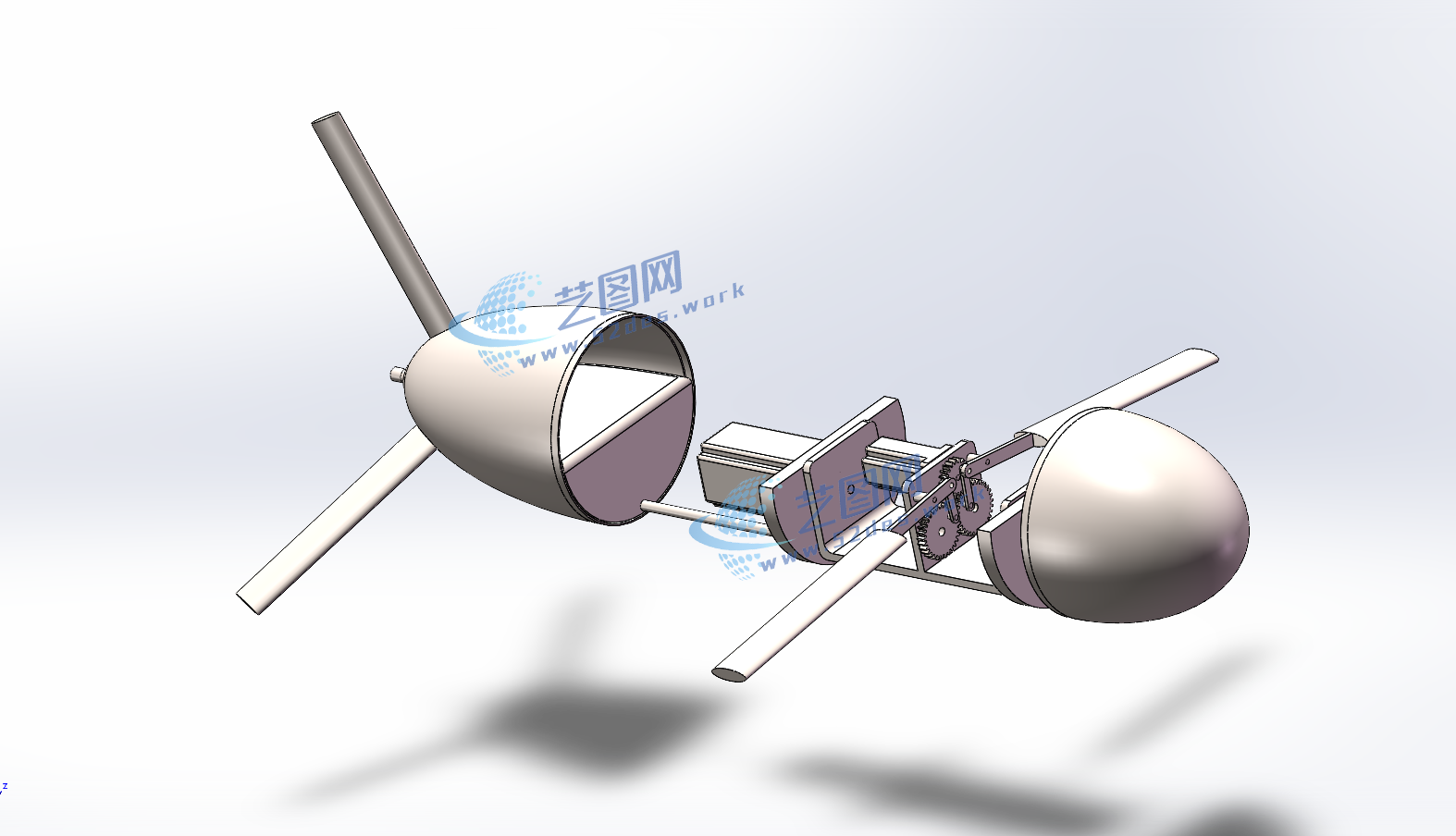 水下机器人solidworks16版本三维装配模型
水下机器人solidworks16版本三维装配模型 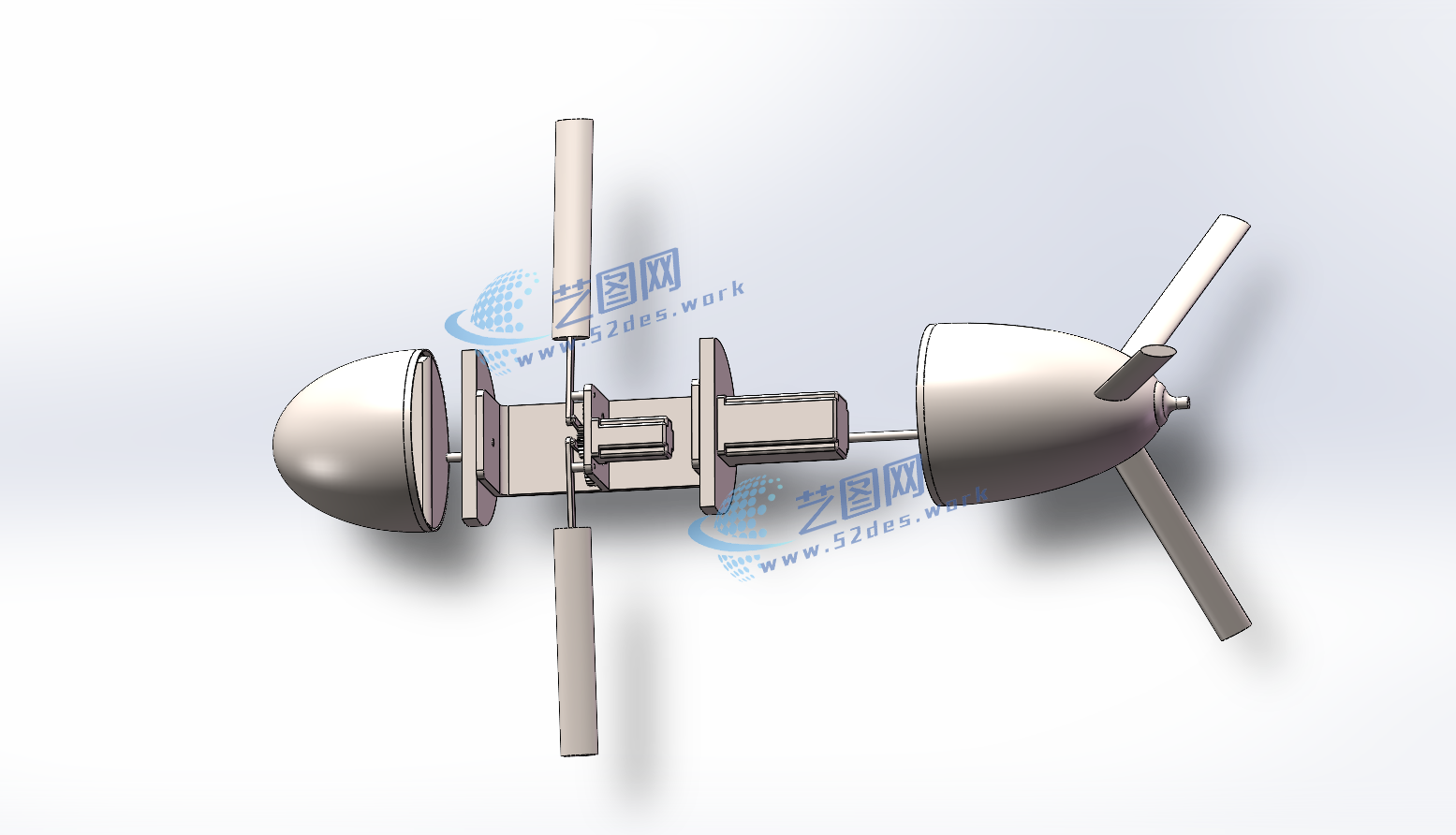 水下机器人solidworks16版本三维装配模型
水下机器人solidworks16版本三维装配模型  水下机器人solidworks16版本三维装配模型
水下机器人solidworks16版本三维装配模型 
水下机器人是一种专为水下任务设计的机器人,其结构通常包括主体机体、推进系统、传感器组件和控制单元。主体机体通常具备高度密封性,以保护内部电子设备不受水压和水的侵蚀。推进系统可由螺旋桨、喷射器或履带组成,用于推动机器人在水下移动。传感器组件包括声纳、摄像头、水下定位系统等,用于感知水下环境、导航和执行任务。控制单元负责处理传感器数据、执行任务和操控机器人的运动。水下机器人的结构使其适用于海洋勘测、深海探索、水下修复和海洋生物研究等各种水下任务,为科学研究和工程应用提供了强大的工具。
