
 洛河4轴机器人solidworks17版本模型源文件,可编辑
洛河4轴机器人solidworks17版本模型源文件,可编辑  洛河4轴机器人solidworks17版本、三维模型零件预览图
洛河4轴机器人solidworks17版本、三维模型零件预览图 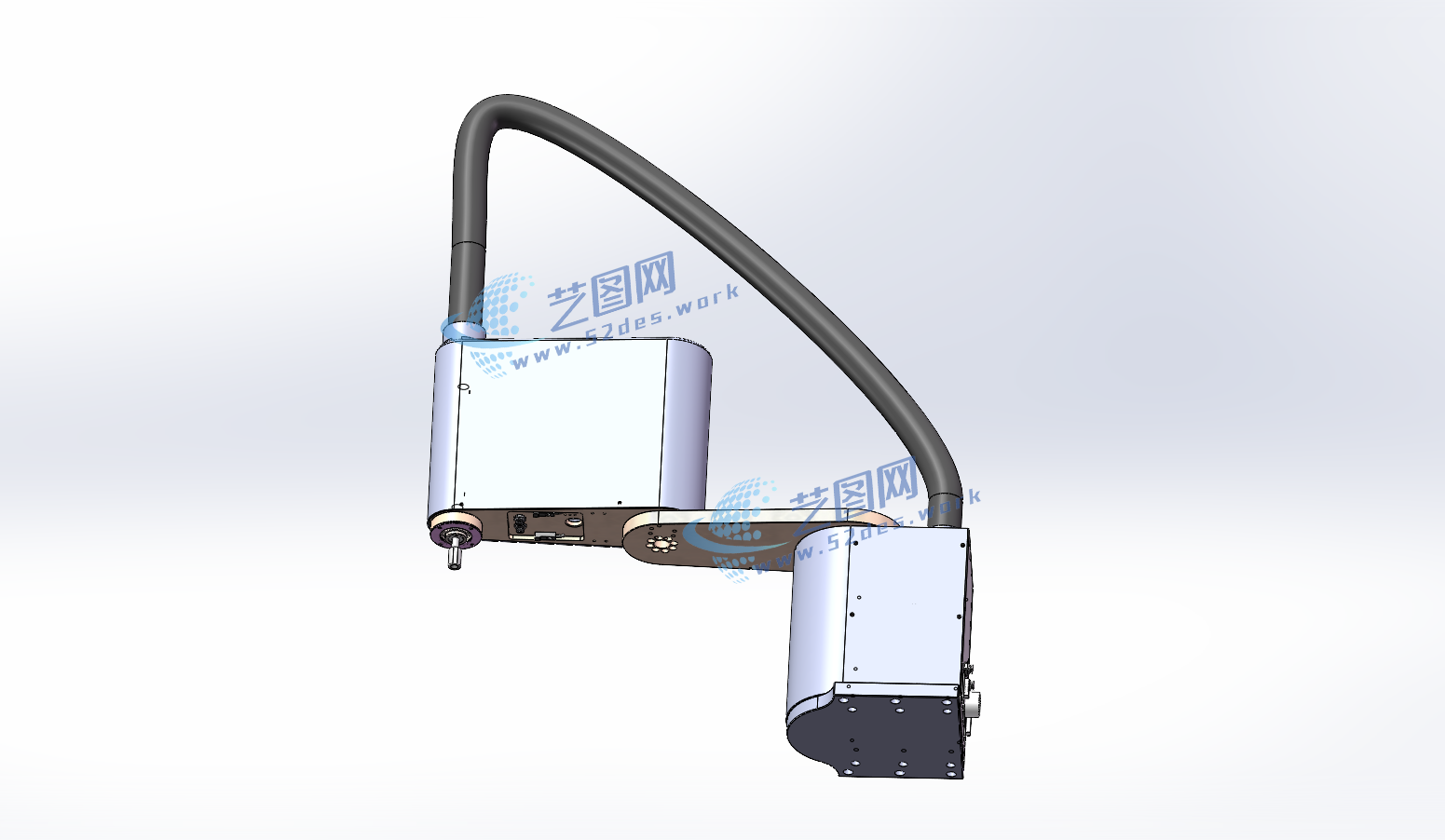 洛河4轴机器人solidworks17版本三维装配模型
洛河4轴机器人solidworks17版本三维装配模型  洛河4轴机器人solidworks17版本三维装配模型
洛河4轴机器人solidworks17版本三维装配模型 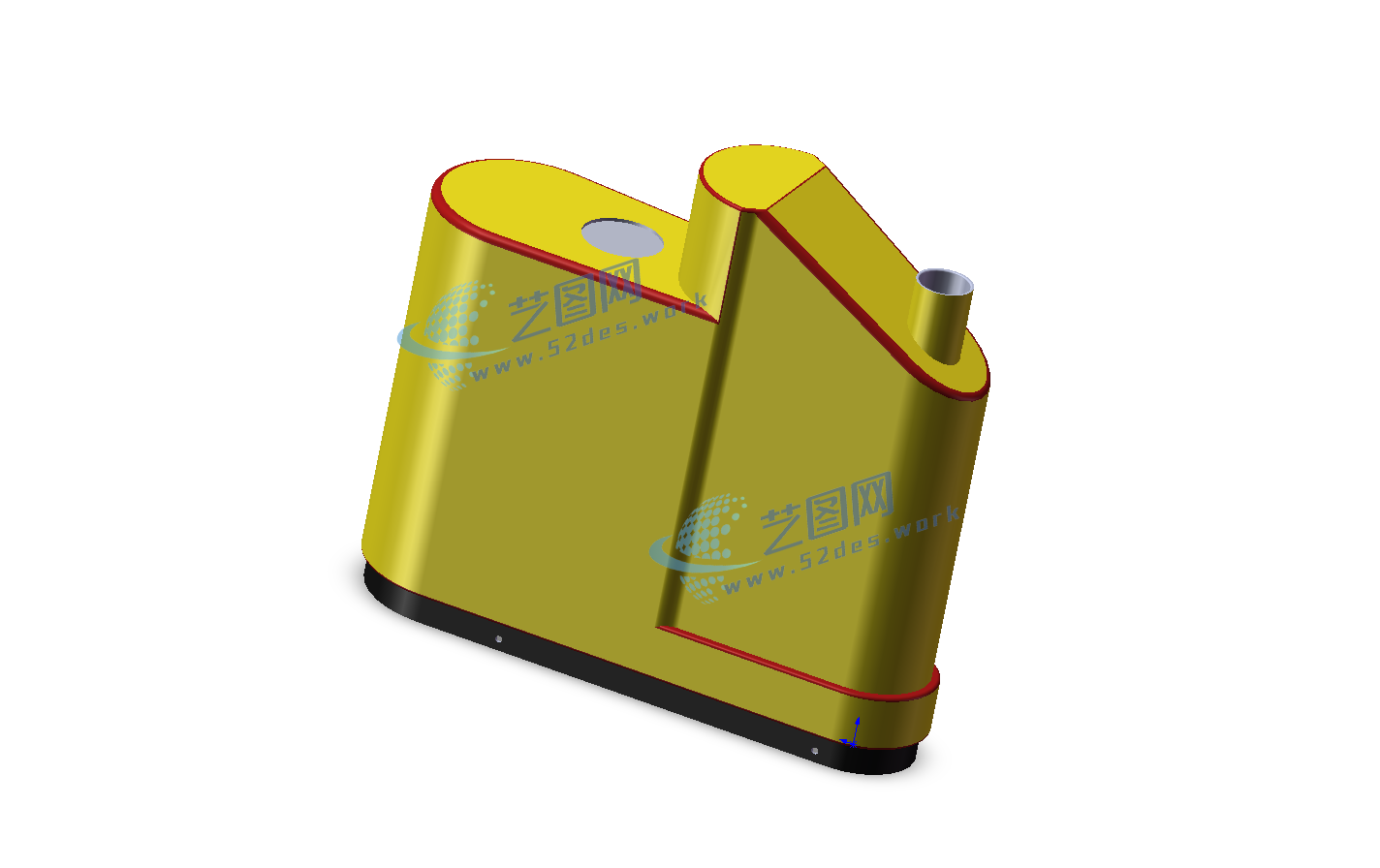 洛河4轴机器人solidworks17版本三维装配模型
洛河4轴机器人solidworks17版本三维装配模型 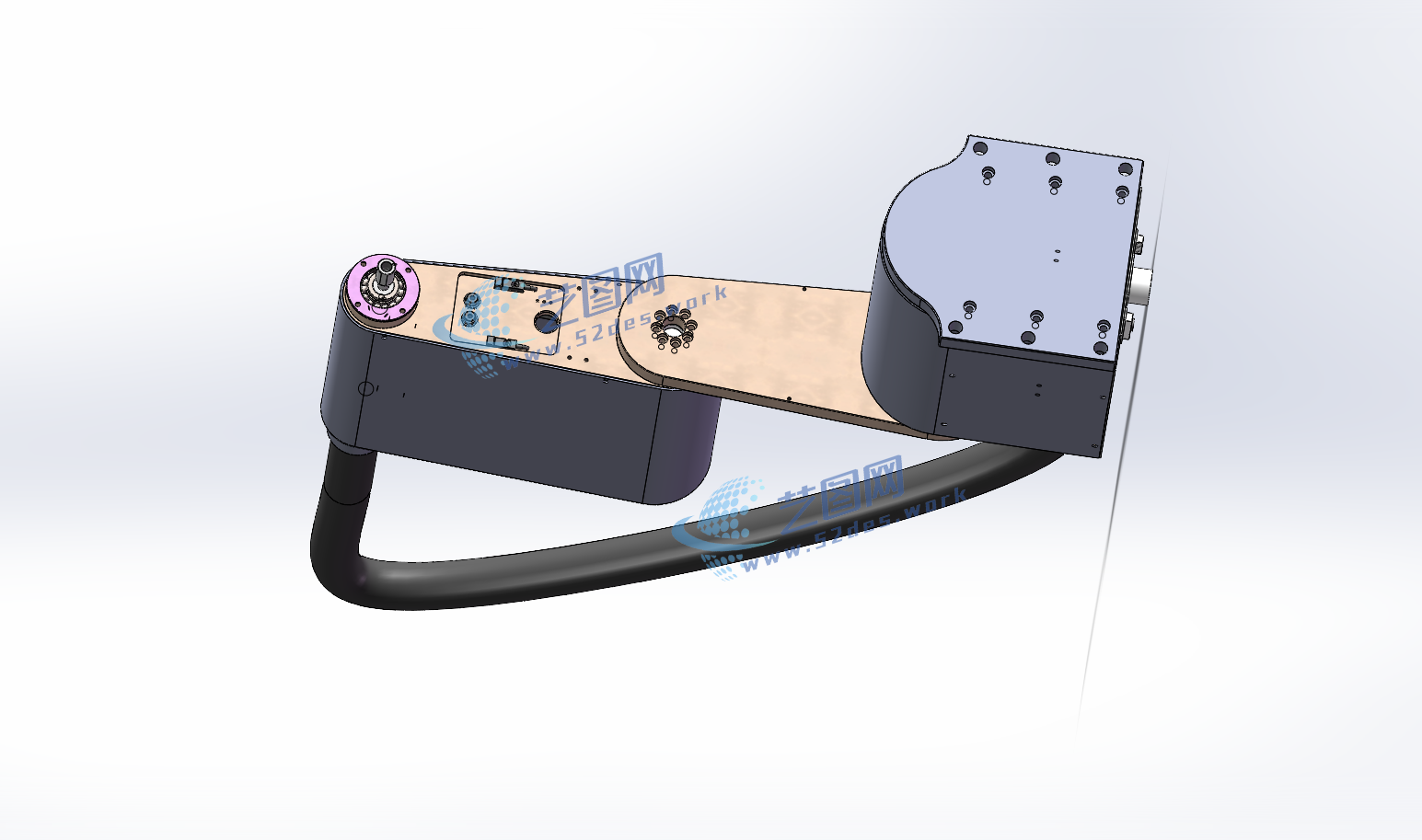
洛河4轴机器人是一种具有四个轴(四个自由度)的机械臂机器人,其结构包括底座、第一、第二、第三和第四轴、机械臂末端执行器以及控制系统。底座是机器人的稳定支架,承载整个结构。第一轴允许机械臂在水平方向上旋转,第二轴使机械臂能够上下移动,第三轴允许机械臂在垂直平面内旋转,第四轴控制机械臂末端执行器的开合。机械臂末端执行器通常是各种工具或夹具,用于执行具体的任务。
