
 履带车救援机器人solidworks12版本模型源文件,可编辑
履带车救援机器人solidworks12版本模型源文件,可编辑  履带车救援机器人solidworks12版本、三维模型零件预览图
履带车救援机器人solidworks12版本、三维模型零件预览图 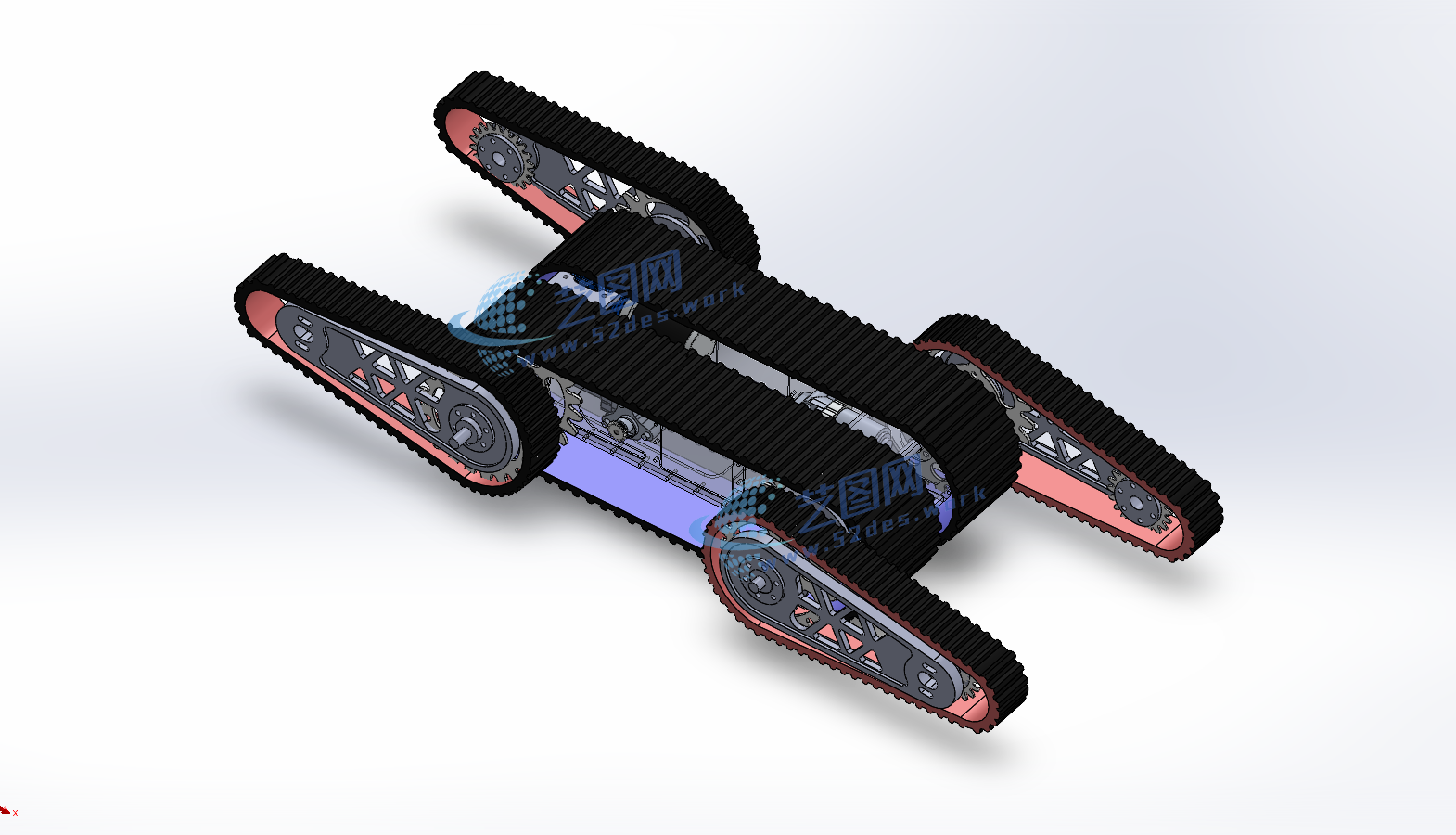 履带车救援机器人solidworks12版本三维装配模型
履带车救援机器人solidworks12版本三维装配模型 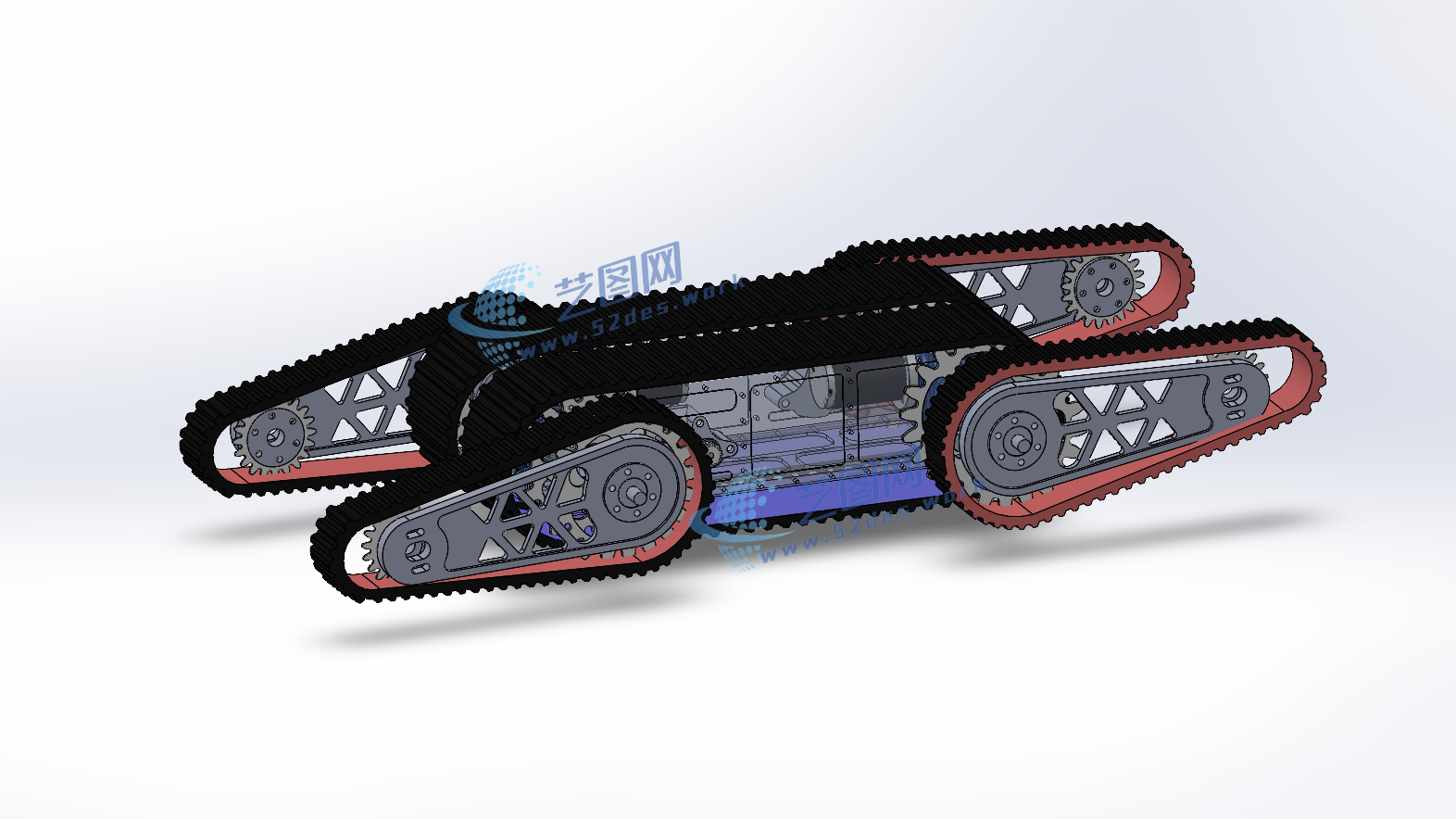 履带车救援机器人solidworks12版本三维装配模型
履带车救援机器人solidworks12版本三维装配模型 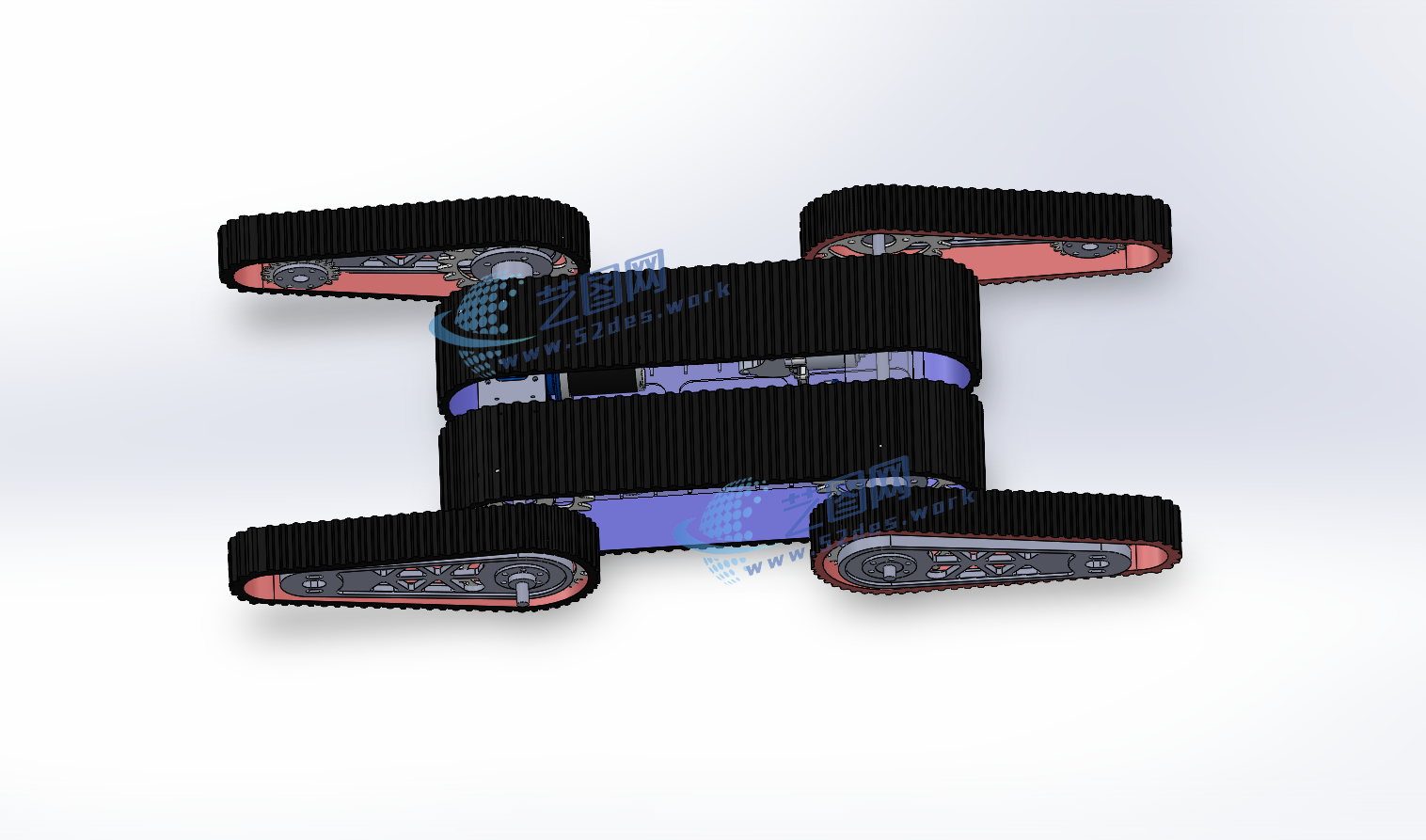 履带车救援机器人solidworks12版本三维装配模型
履带车救援机器人solidworks12版本三维装配模型 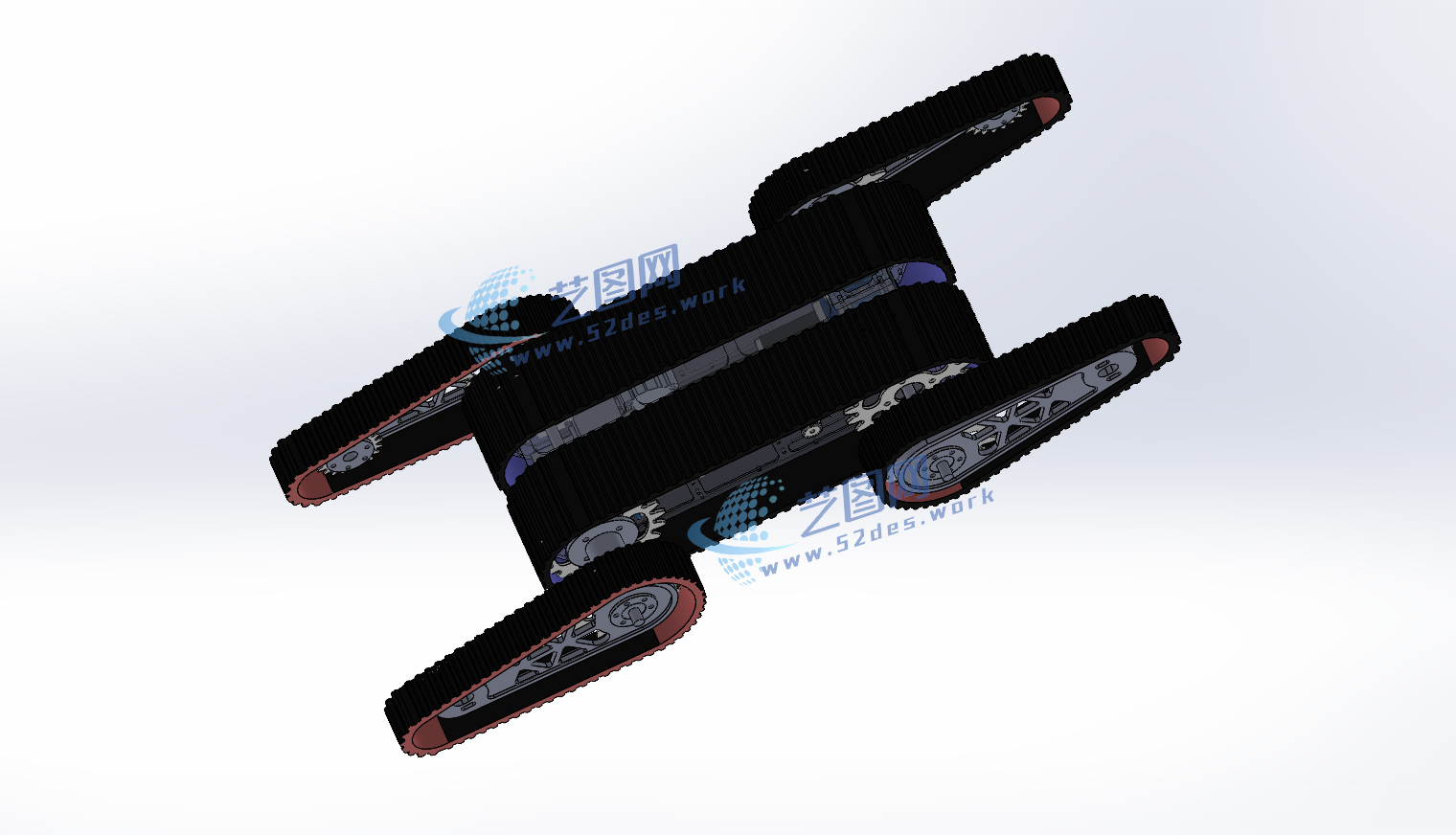
履带车救援机器人的结构主要包括履带底盘、机械臂、传感器系统、控制单元和通信设备。履带底盘提供了机器人的稳定支撑和机动性,允许其在各种恶劣地形和环境中移动。机械臂通常位于机器人的顶部,用于执行各种救援任务,如搜救、物资运输或设备操作。传感器系统包括摄像头、烟雾探测器、温度传感器等,用于感知环境、监测火灾或救援现场的情况。
