
 轴铰接式机器人solidworks16版本模型源文件,可编辑
轴铰接式机器人solidworks16版本模型源文件,可编辑  轴铰接式机器人solidworks16版本、三维模型零件预览图
轴铰接式机器人solidworks16版本、三维模型零件预览图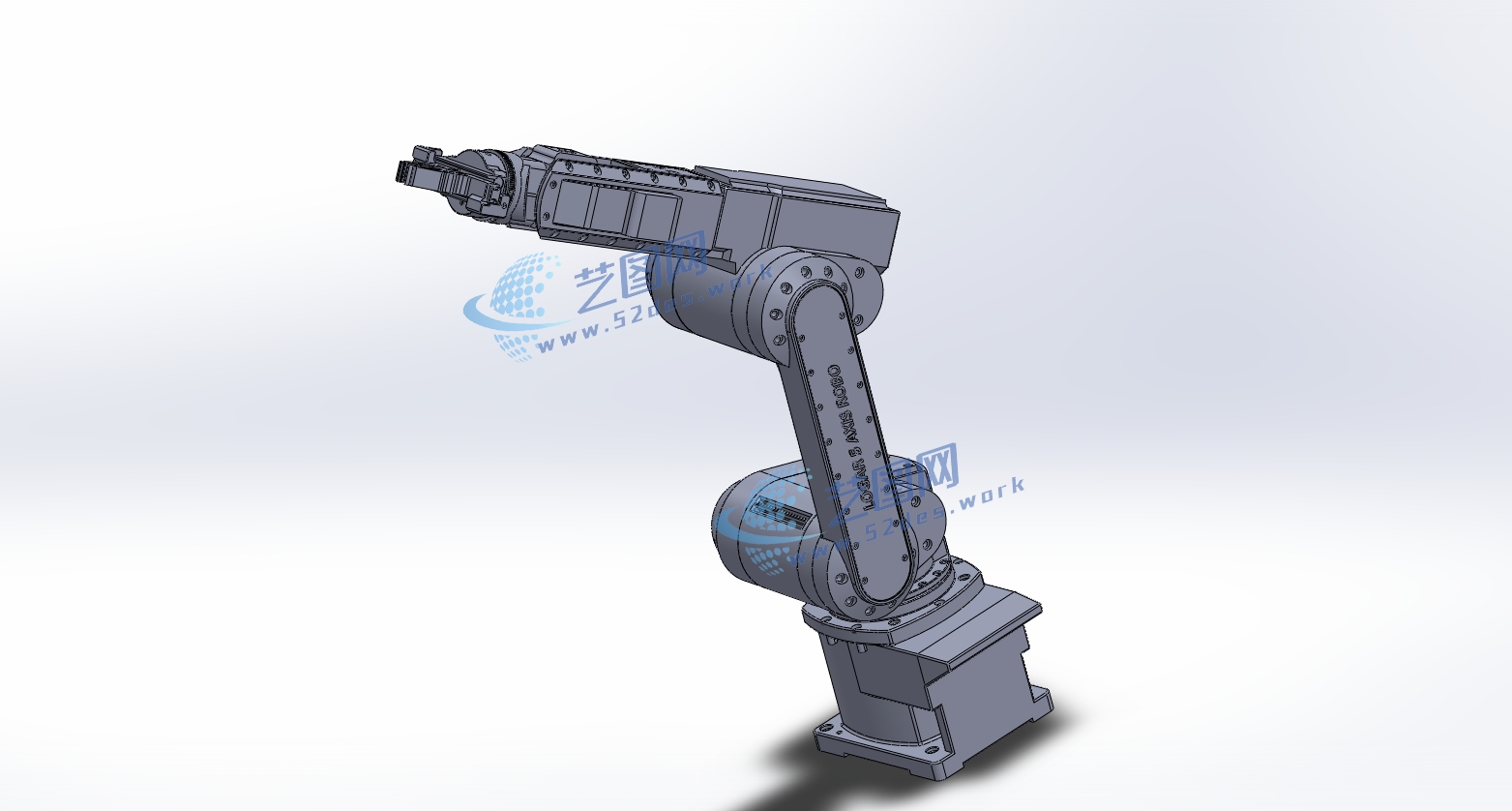 轴铰接式机器人solidworks16版本三维装配模型
轴铰接式机器人solidworks16版本三维装配模型 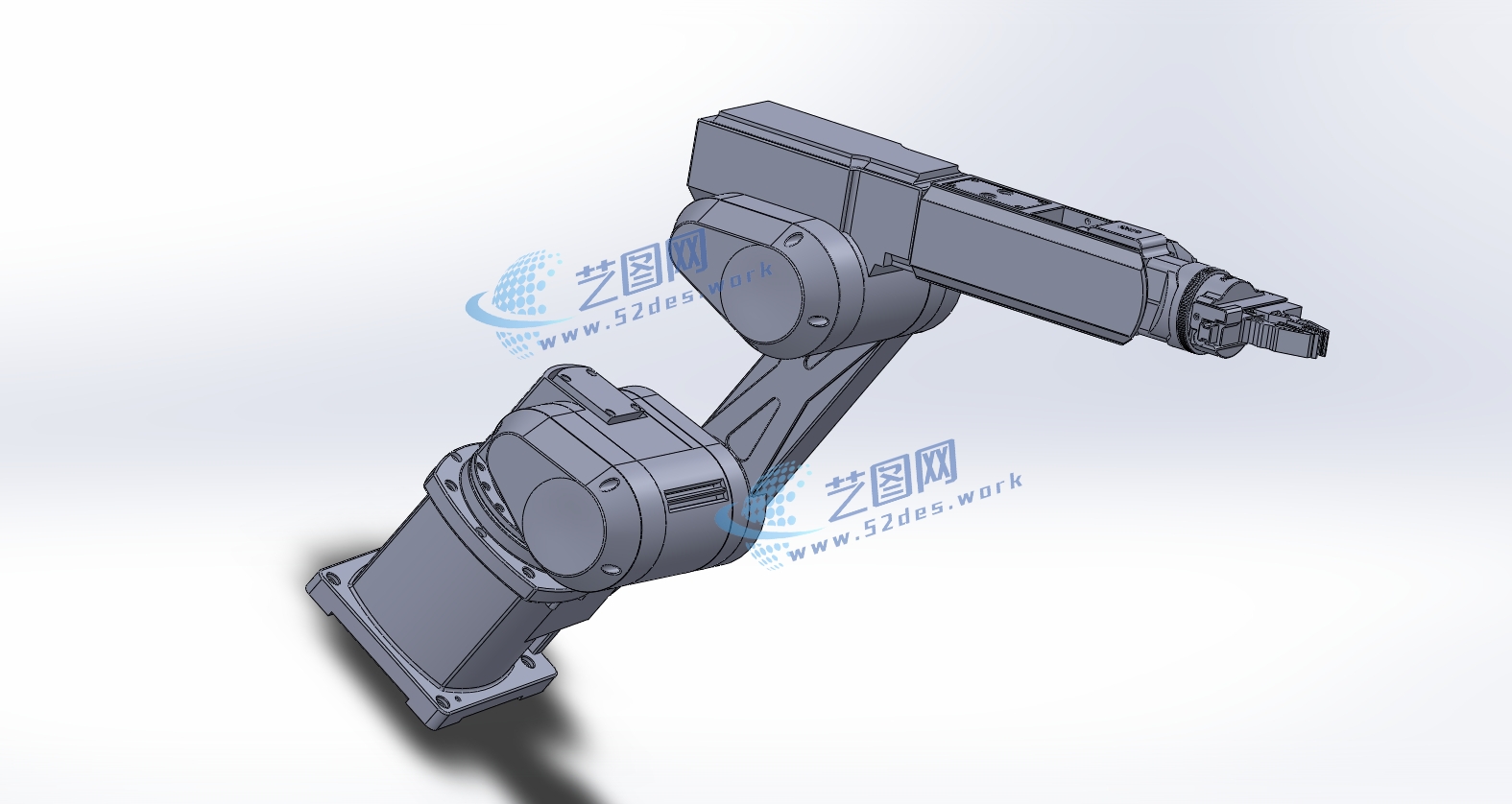 轴铰接式机器人solidworks16版本三维装配模型
轴铰接式机器人solidworks16版本三维装配模型 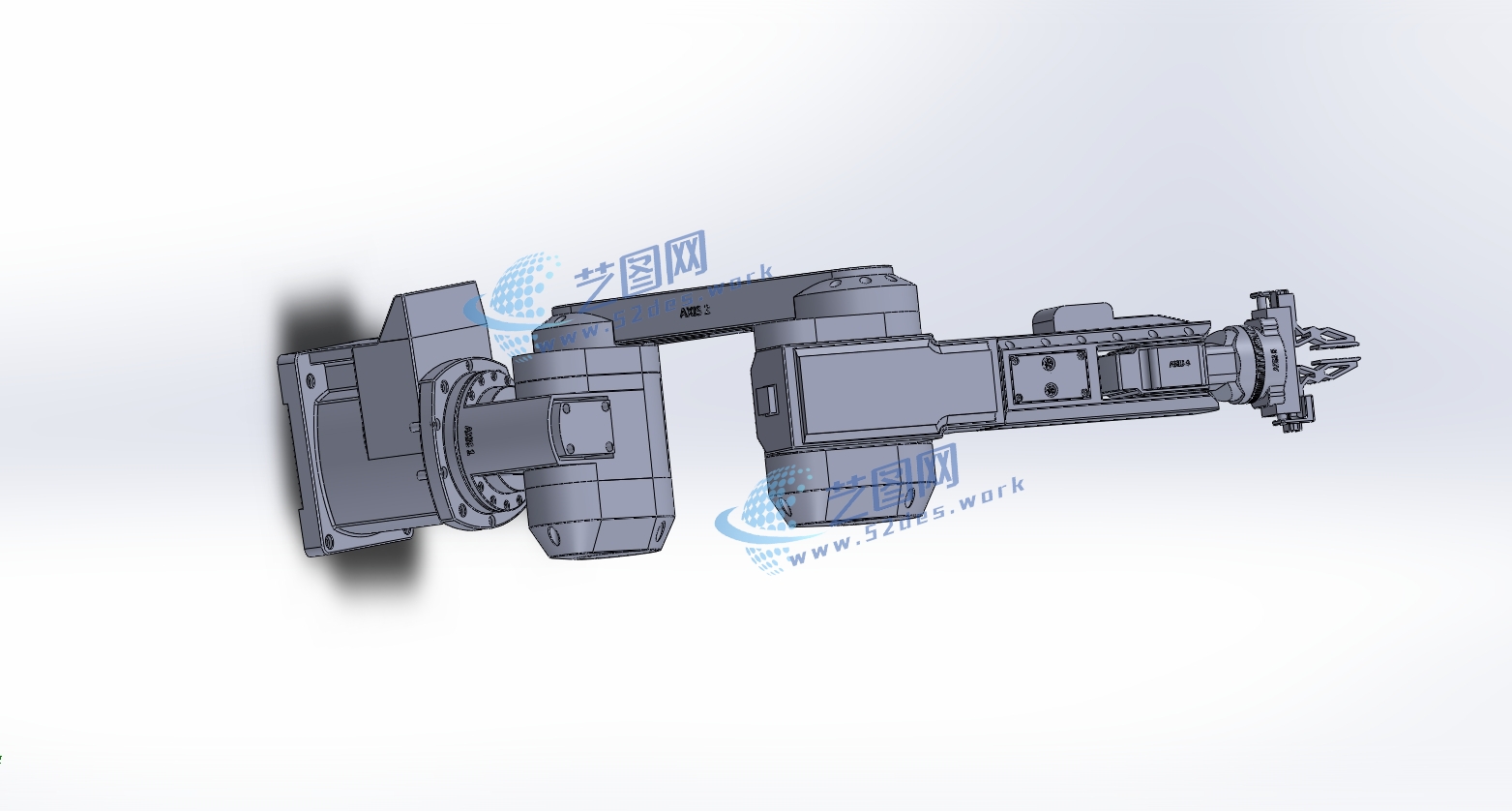 轴铰接式机器人solidworks16版本三维装配模型
轴铰接式机器人solidworks16版本三维装配模型 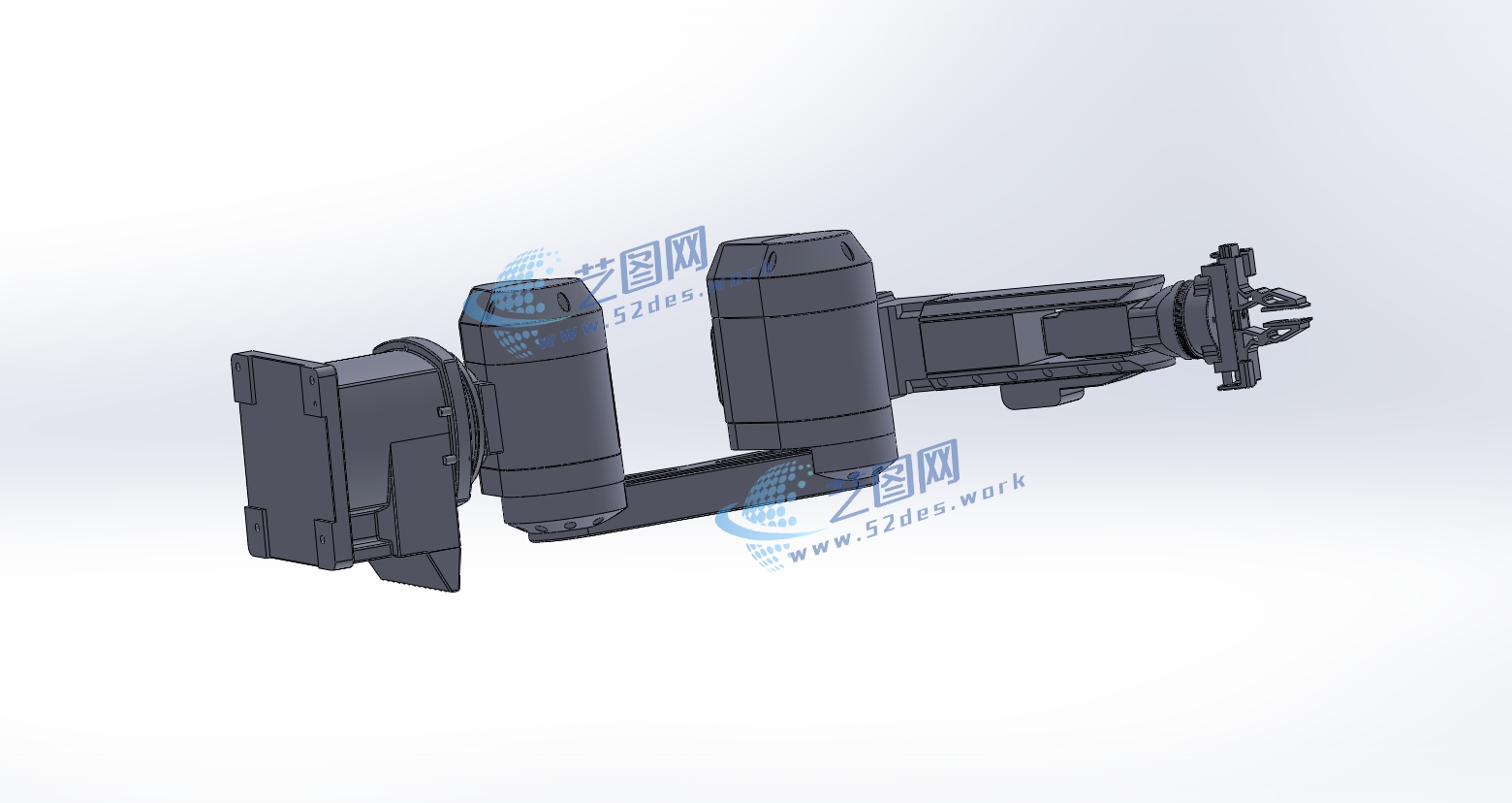
轴铰接式机器人的结构设计包括一个坚固的机身,上面配置了多个铰接关节、执行器、传感器组、控制单元和电源系统。这些铰接关节允许机器人在多个轴向上运动,提供了复杂的姿势和运动灵活性。执行器用于控制每个铰接关节的运动,传感器组包括编码器、陀螺仪和力传感器,用于感知机器人的位置、方向和力。控制单元协调执行器的操作,以实现机器人的精确控制和路径规划。电源系统为机器人提供所需的电力。整个结构设计旨在提供高度可编程和多用途的机器人,适用于制造、装配、医疗和研究等各种应用领域,以提高自动化和任务执行的灵活性。
