
 四向穿梭车RGV机器人solidworks18版本模型源文件
四向穿梭车RGV机器人solidworks18版本模型源文件  四向穿梭车RGV机器人solidworks18版本、三维模型零件预览图
四向穿梭车RGV机器人solidworks18版本、三维模型零件预览图 四向穿梭车RGV机器人solidworks18版本三维装配模型
四向穿梭车RGV机器人solidworks18版本三维装配模型 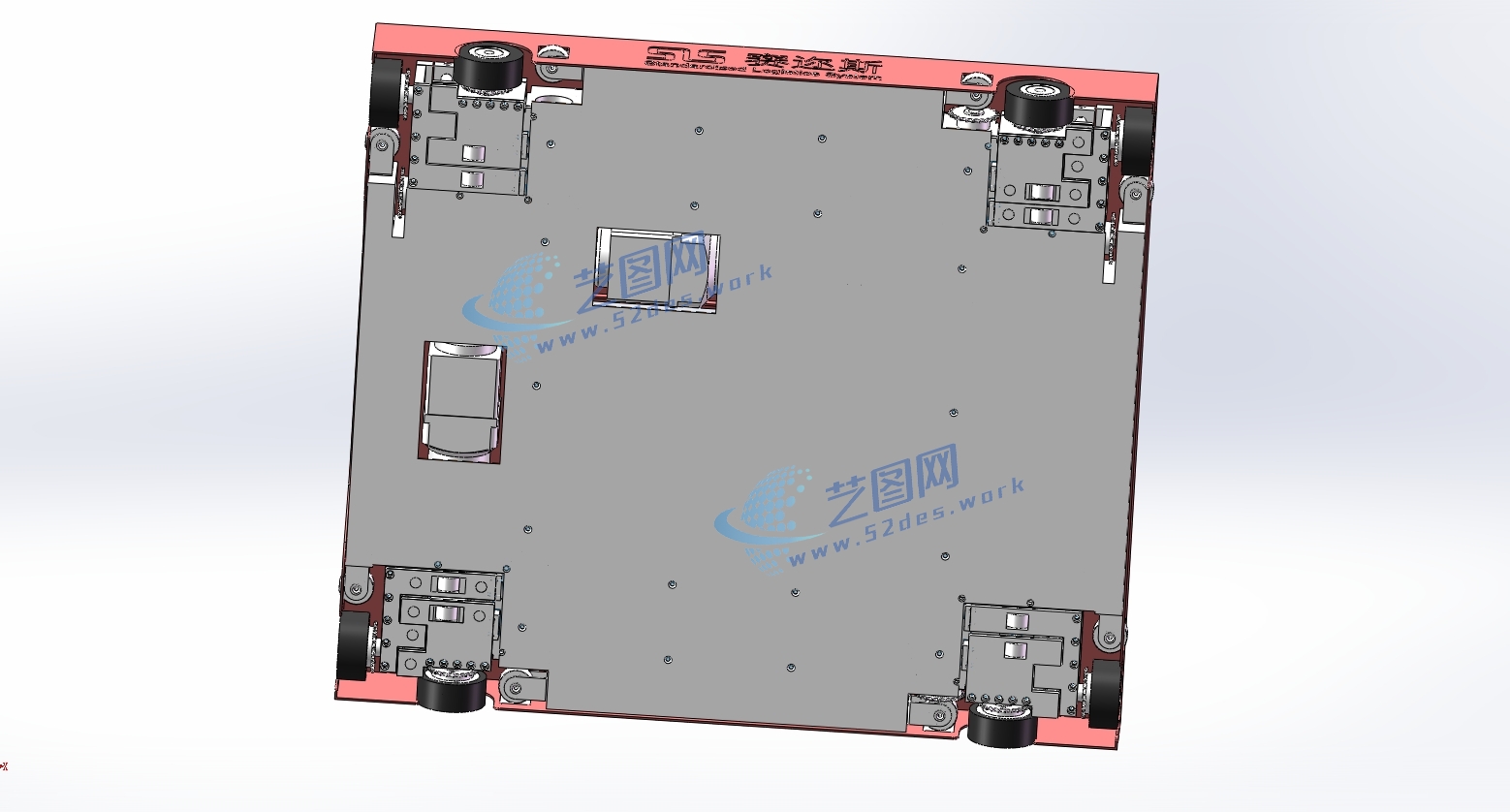 四向穿梭车RGV机器人solidworks18版本三维装配模型
四向穿梭车RGV机器人solidworks18版本三维装配模型 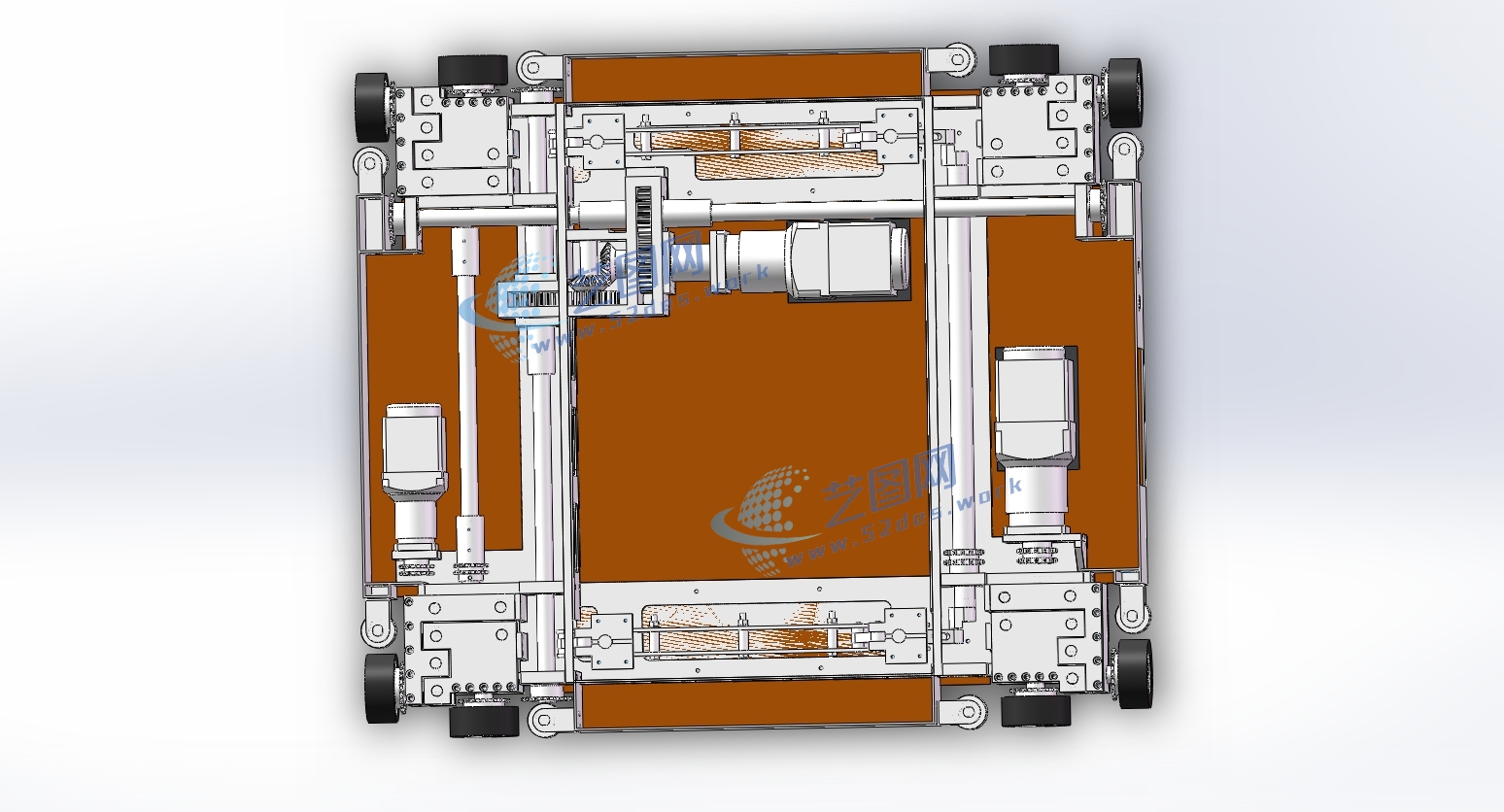 四向穿梭车RGV机器人solidworks18版本三维装配模型
四向穿梭车RGV机器人solidworks18版本三维装配模型 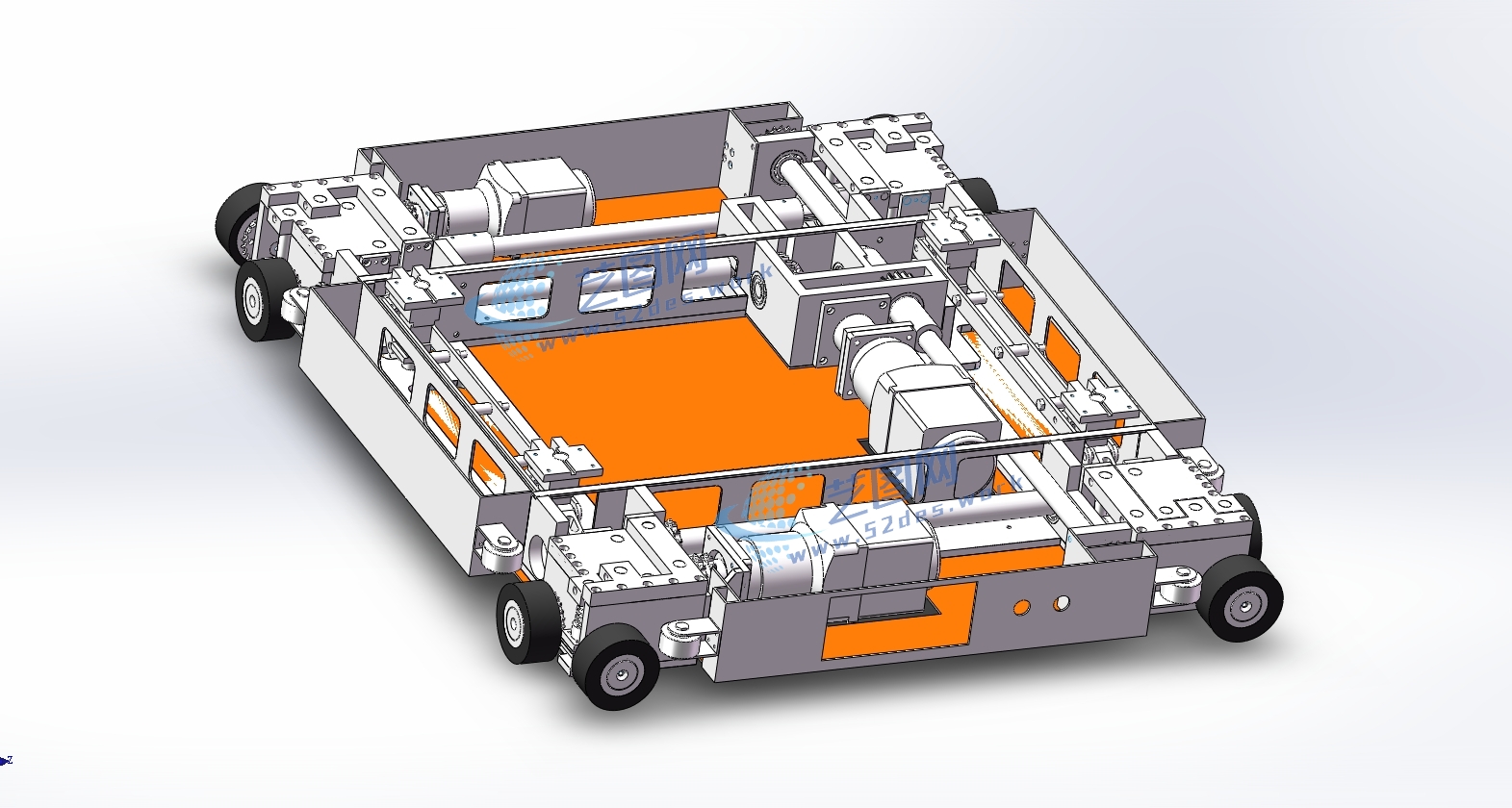
四向穿梭车(RGV)机器人的结构设计包括一个坚固的底盘,上面配置了四个独立驱动的轮子、导轨系统、货架和控制系统。四个轮子通常布置在底盘的四个角,以实现机器人的全向移动能力。导轨系统用于引导机器人在仓库或生产场地中的精确定位和移动。货架用于携带和存储物料或货物。控制系统协调轮子的运动、货架的举升和导航,以实现自动化的货物搬运和存储任务。这一结构设计旨在提供高效、可控的货物搬运功能,适用于物流、仓储和生产线自动化,以提高操作效率和降低人力成本。
