
 仿生昆虫飞行机器人solidworks20版本模型源文件
仿生昆虫飞行机器人solidworks20版本模型源文件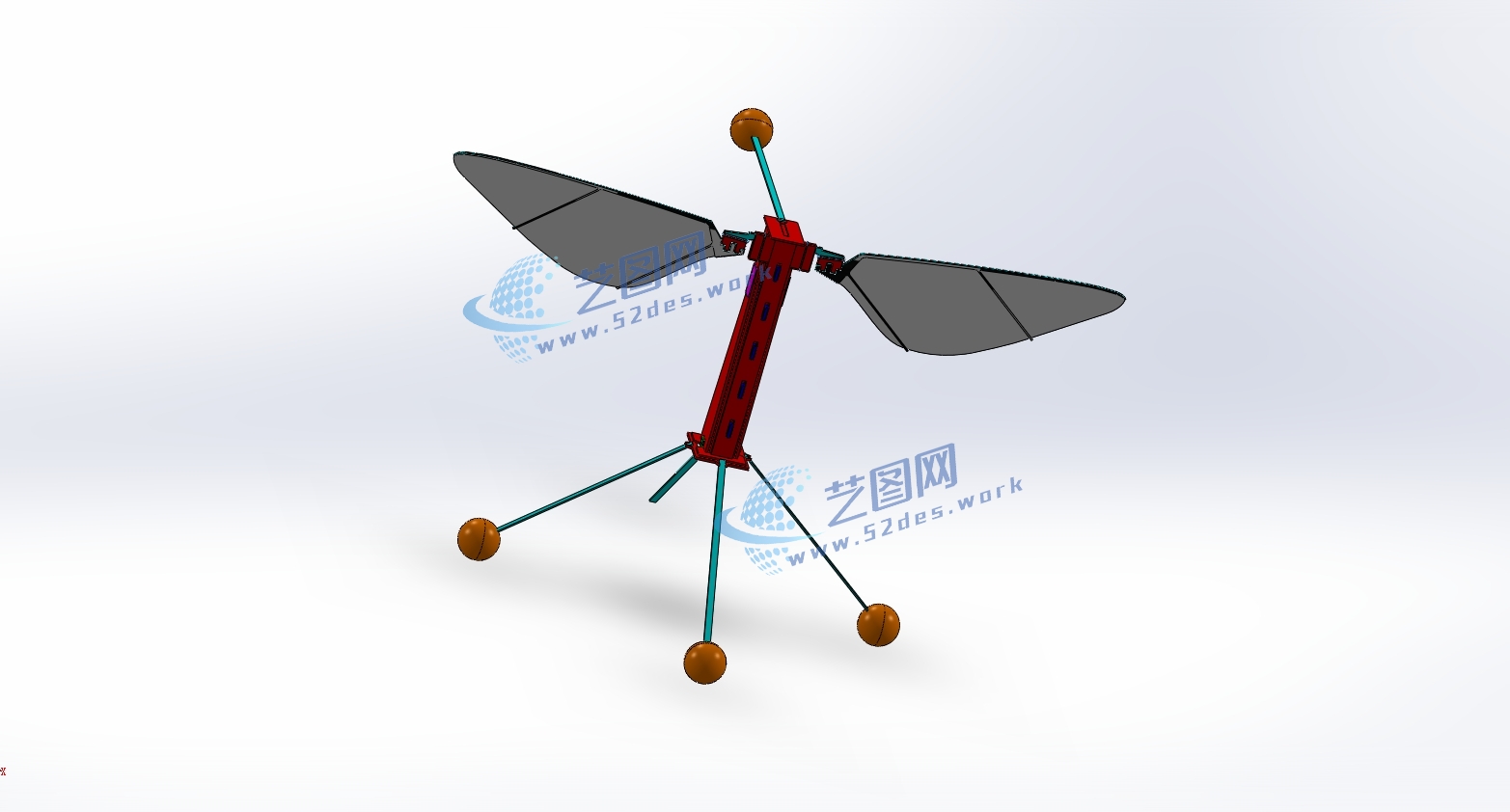 仿生昆虫飞行机器人solidworks20版本三维装配模型
仿生昆虫飞行机器人solidworks20版本三维装配模型  仿生昆虫飞行机器人solidworks20版本三维装配模型
仿生昆虫飞行机器人solidworks20版本三维装配模型 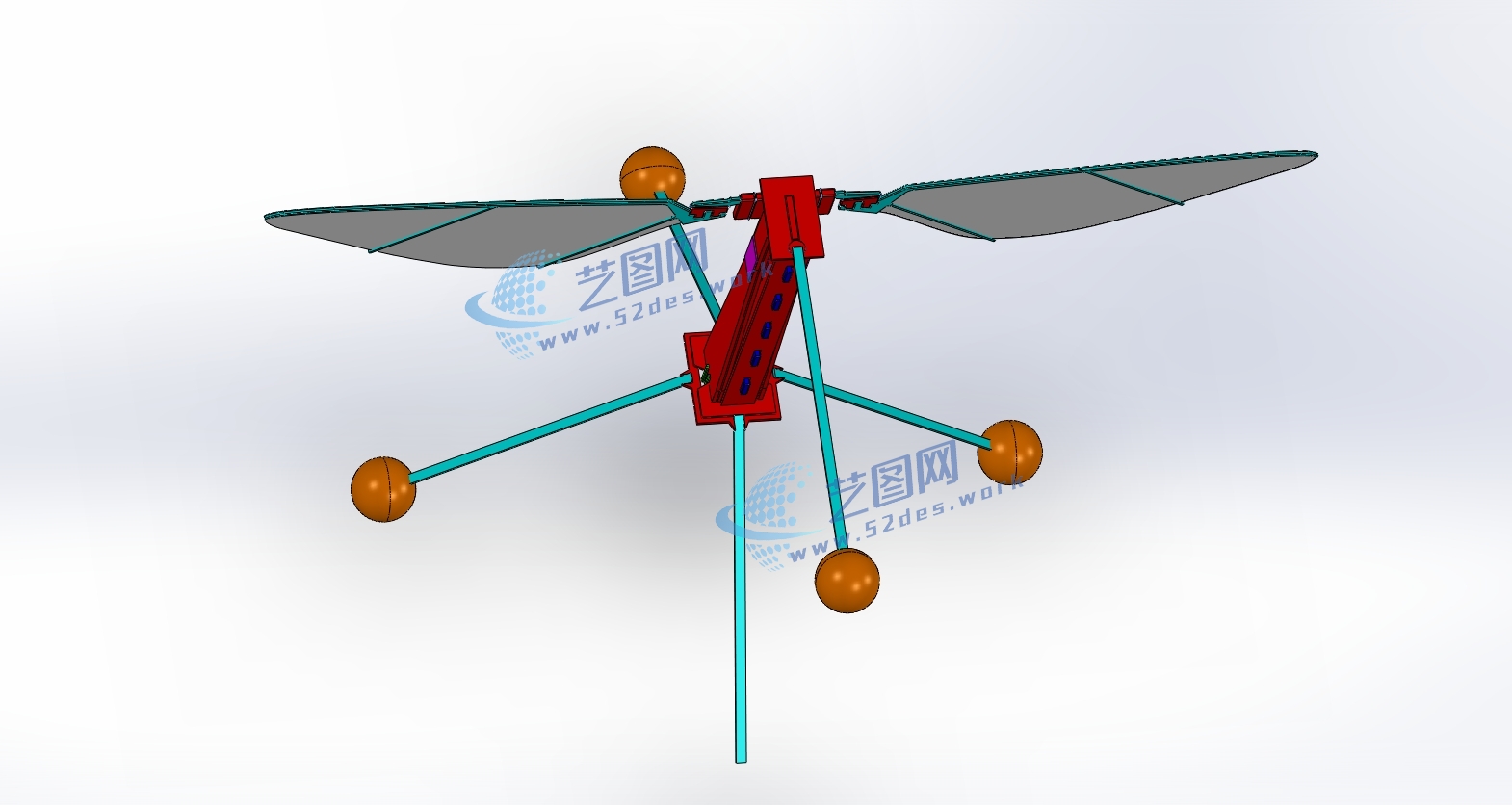 仿生昆虫飞行机器人solidworks20版本三维装配模型
仿生昆虫飞行机器人solidworks20版本三维装配模型 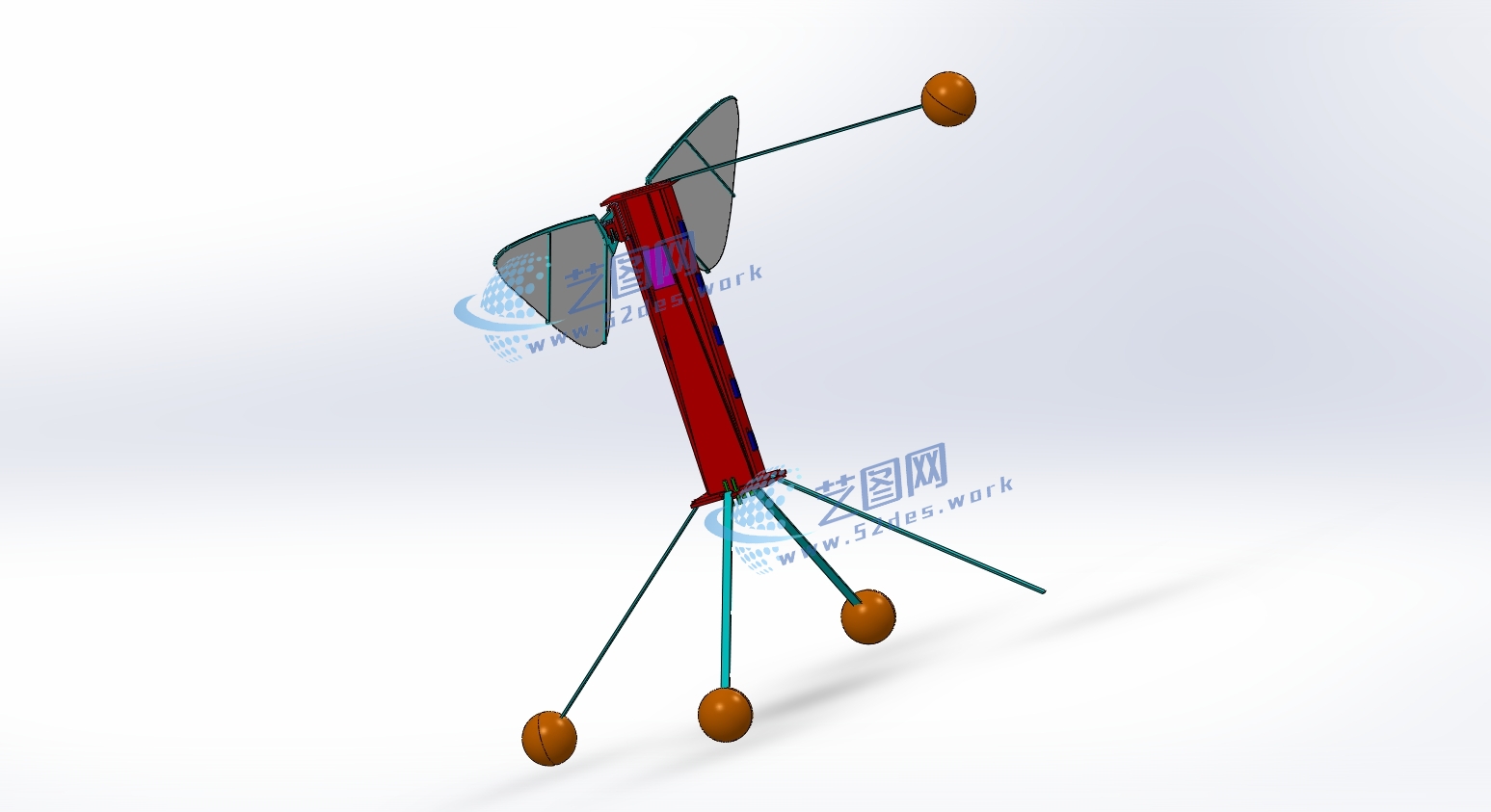
仿生昆虫飞行机器人的结构设计包括机体、翅膀、动力系统和控制单元。机体通常模仿昆虫外形,具有轻量、坚固的材质,以容纳电子和机械组件。翅膀通常由柔软而轻巧的材料构成,以实现昆虫般的飞行动作。动力系统包括小型电机、驱动机构和螺旋桨,用于提供飞行动力。控制单元用于监测传感器数据,协调翅膀运动和稳定飞行。整体设计旨在实现生物仿生的飞行机器人,适用于各种应用,如环境监测、搜索救援和科学研究,以模拟昆虫的飞行能力和机动性。
