
 六轴谐波机械手solidworks14版本模型源文件,可编辑
六轴谐波机械手solidworks14版本模型源文件,可编辑 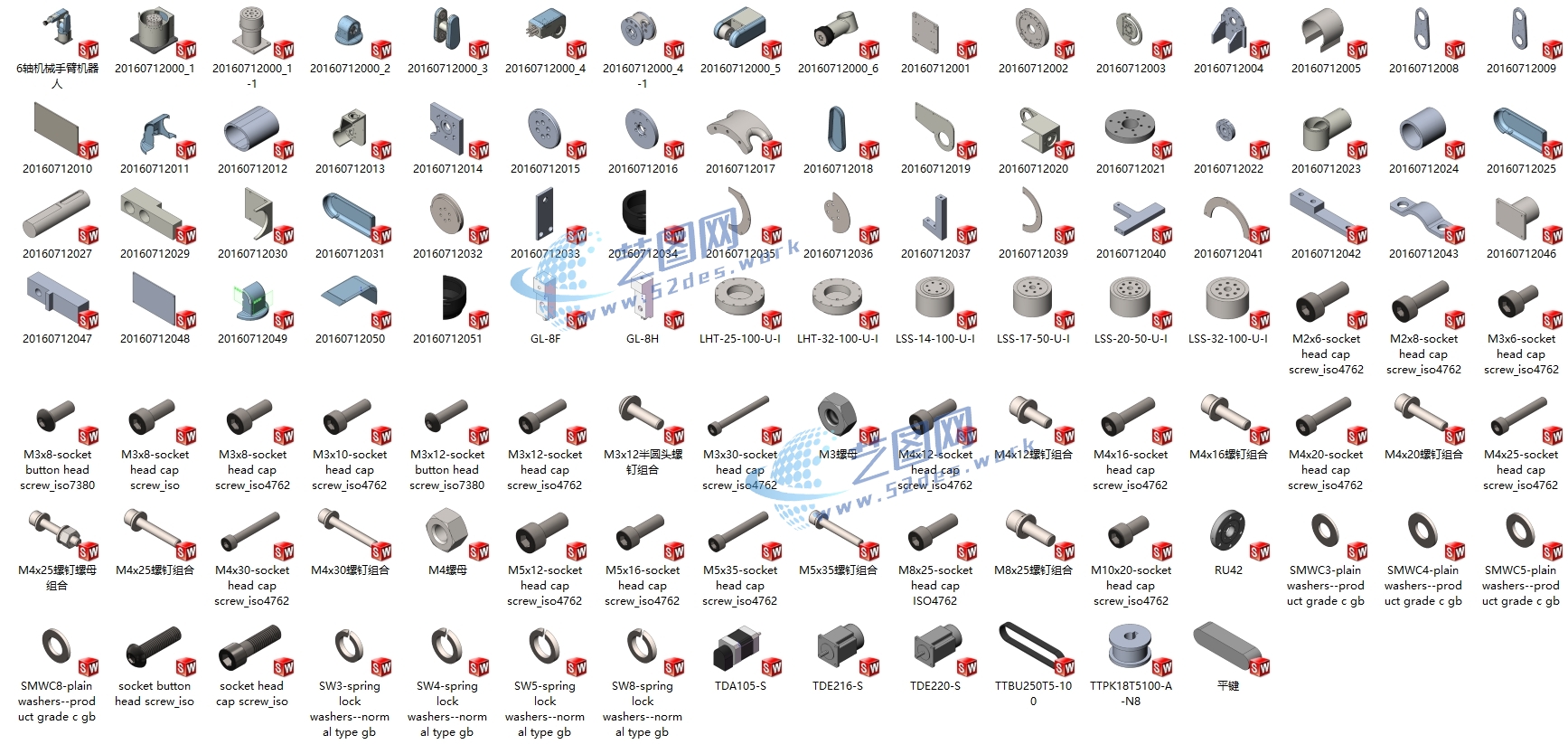 六轴谐波机械手solidworks14版本、三维模型零件预览图
六轴谐波机械手solidworks14版本、三维模型零件预览图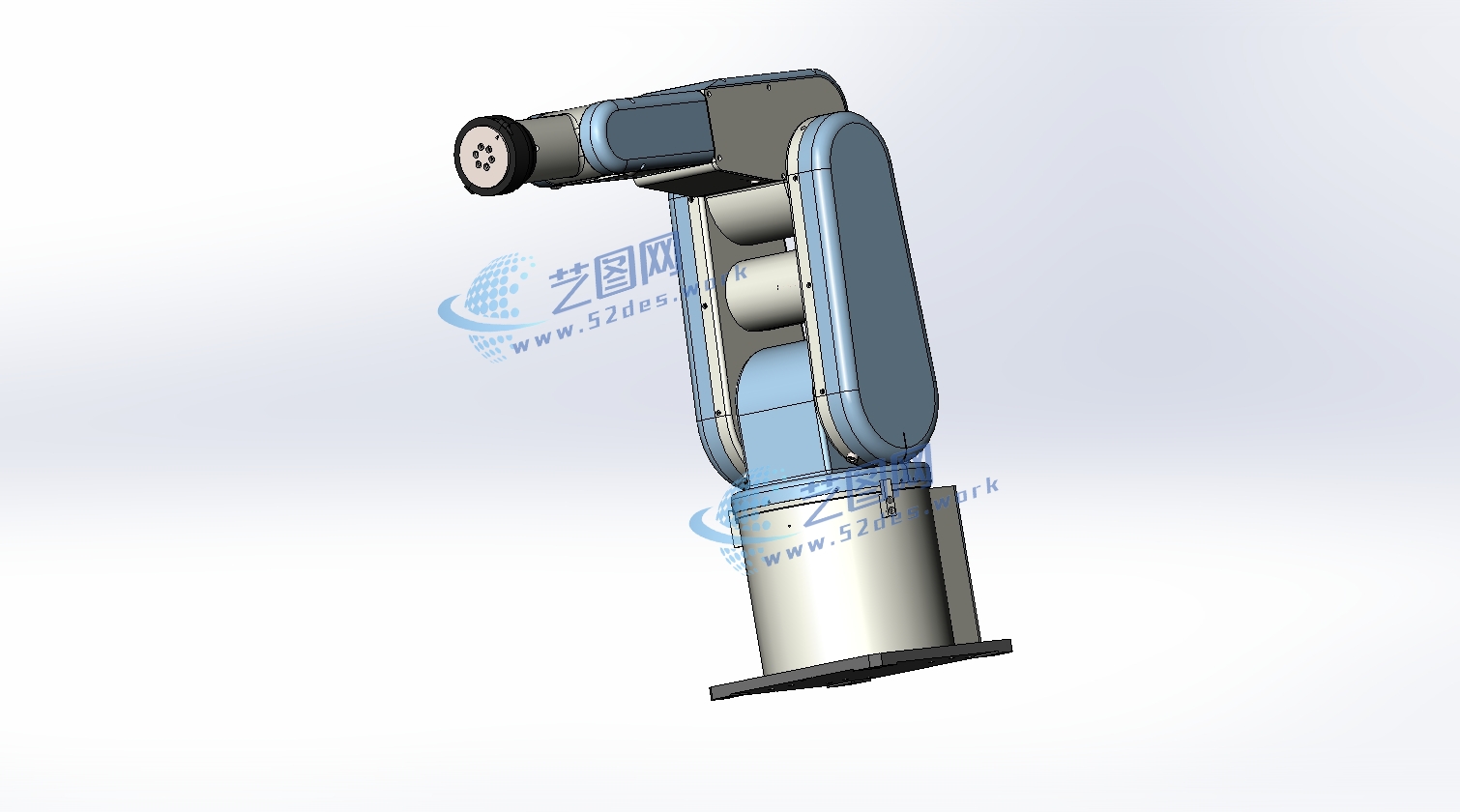 六轴谐波机械手solidworks14版本三维装配模型
六轴谐波机械手solidworks14版本三维装配模型 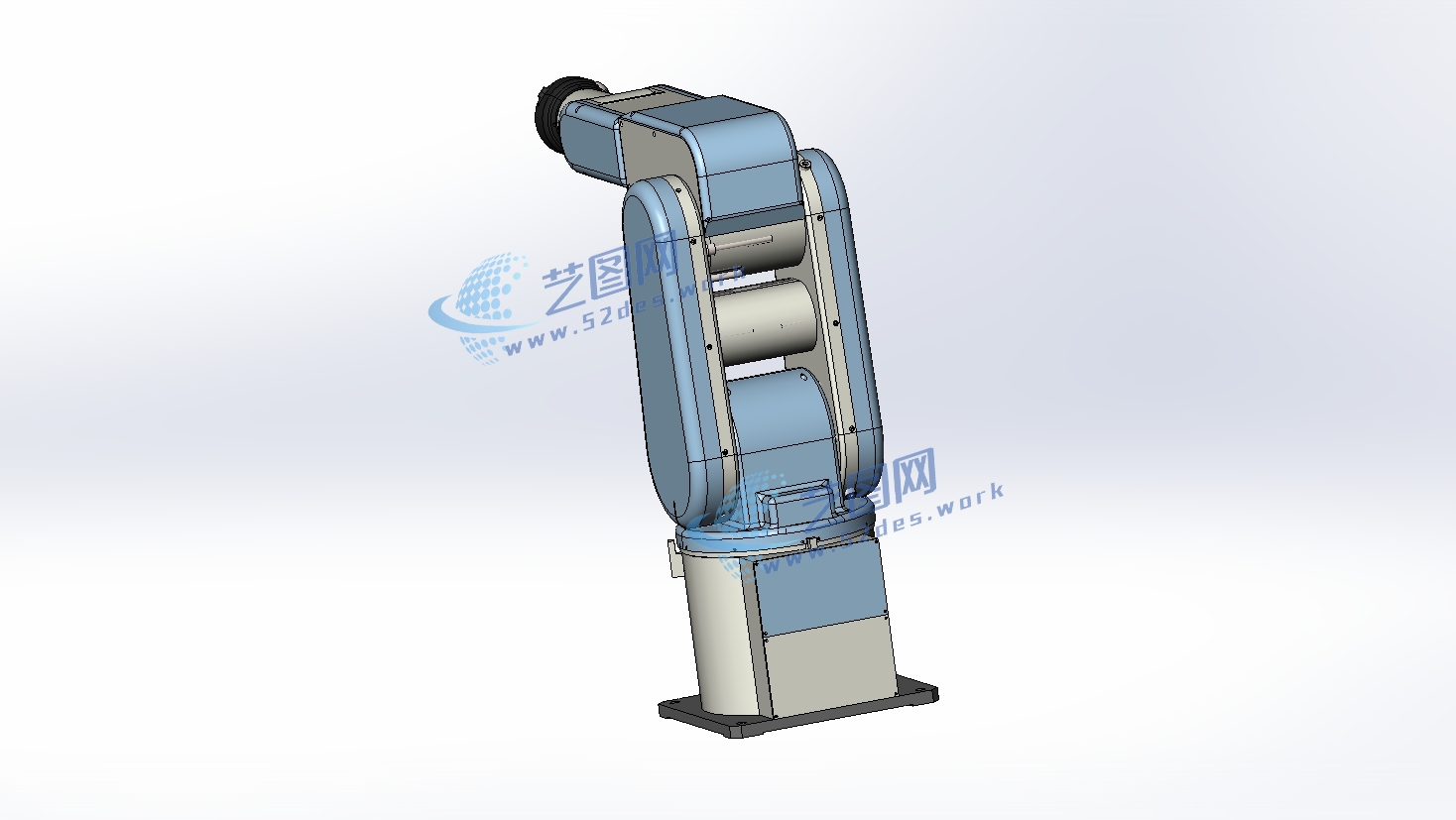 六轴谐波机械手solidworks14版本三维装配模型
六轴谐波机械手solidworks14版本三维装配模型 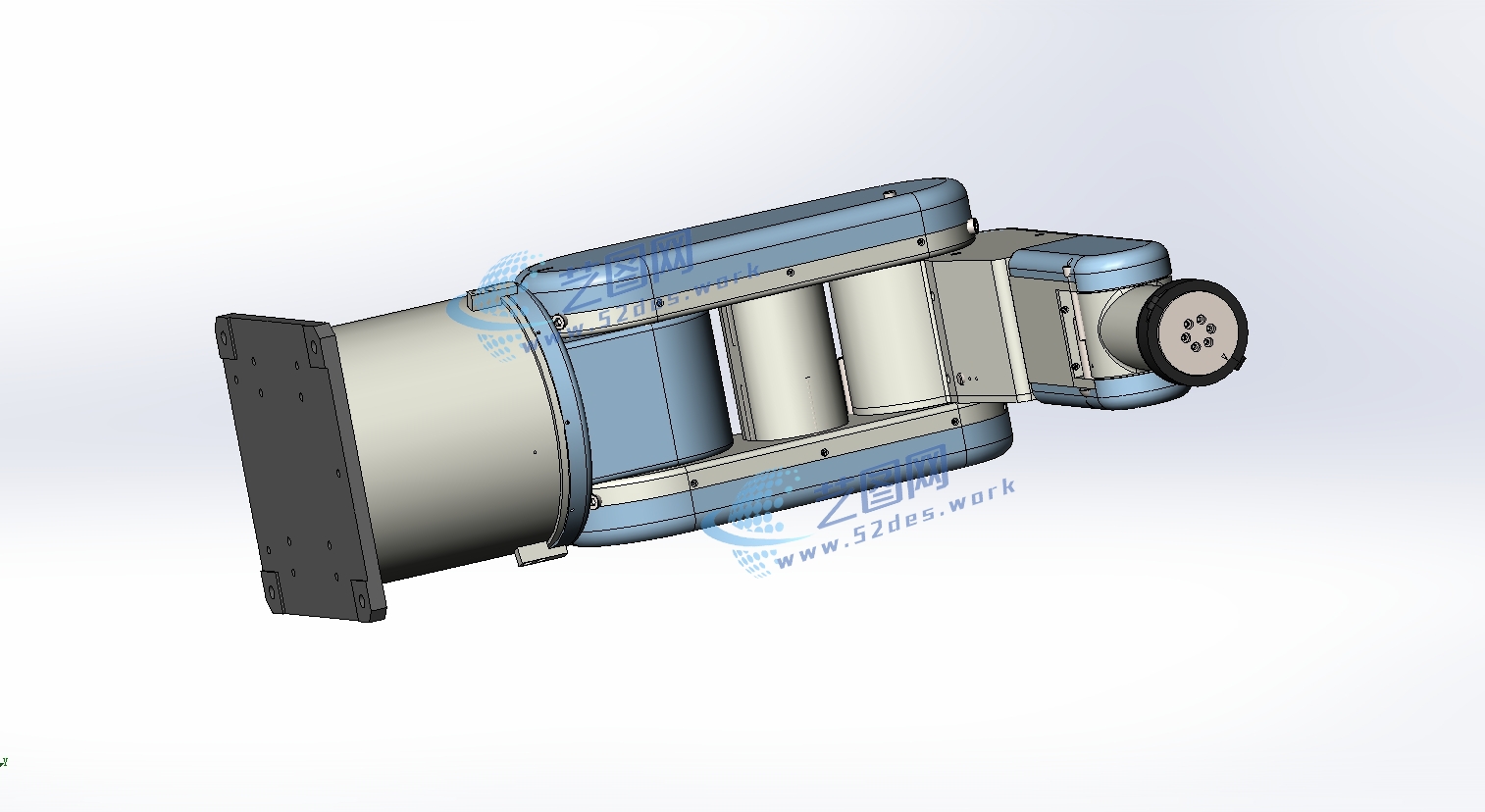 六轴谐波机械手solidworks14版本三维装配模型
六轴谐波机械手solidworks14版本三维装配模型 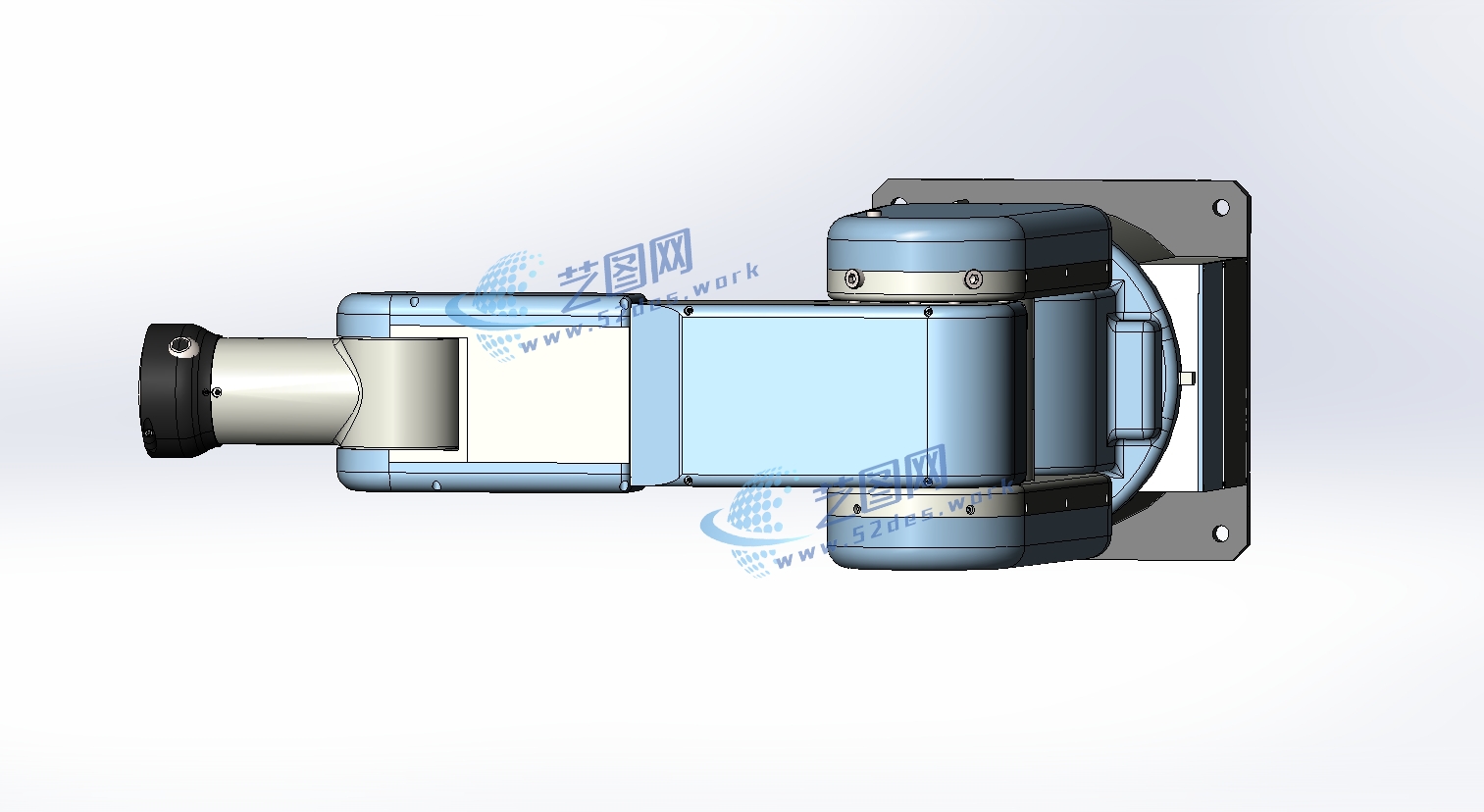
六轴谐波机械手的结构设计包括一个坚固的底座,上面配置了六轴机械臂系统、谐波减速器、传感器系统、控制单元和电源系统。六轴机械臂系统具有高度柔性和精密度,通过六个关节实现多自由度的运动,使机械手能够在复杂的工作环境中执行各种任务。谐波减速器是该机械手的核心组件,通过谐波传动原理提供高扭矩和高精度的运动控制。传感器系统包括位置传感器和力传感器,用于实时监测机械手的运动状态和作用力,实现精准的反馈控制。控制单元协调各个系统的运行,通过先进的算法实现高度智能化的运动规划和控制。电源系统为整个设备提供电力,确保六轴谐波机械手的正常工作。这一结构设计旨在提供高度灵活、精密的自动化解决方案,广泛应用于装配线、精密加工和实验室等领域。
