
 文件内容:CAD图纸、设计说明书
文件内容:CAD图纸、设计说明书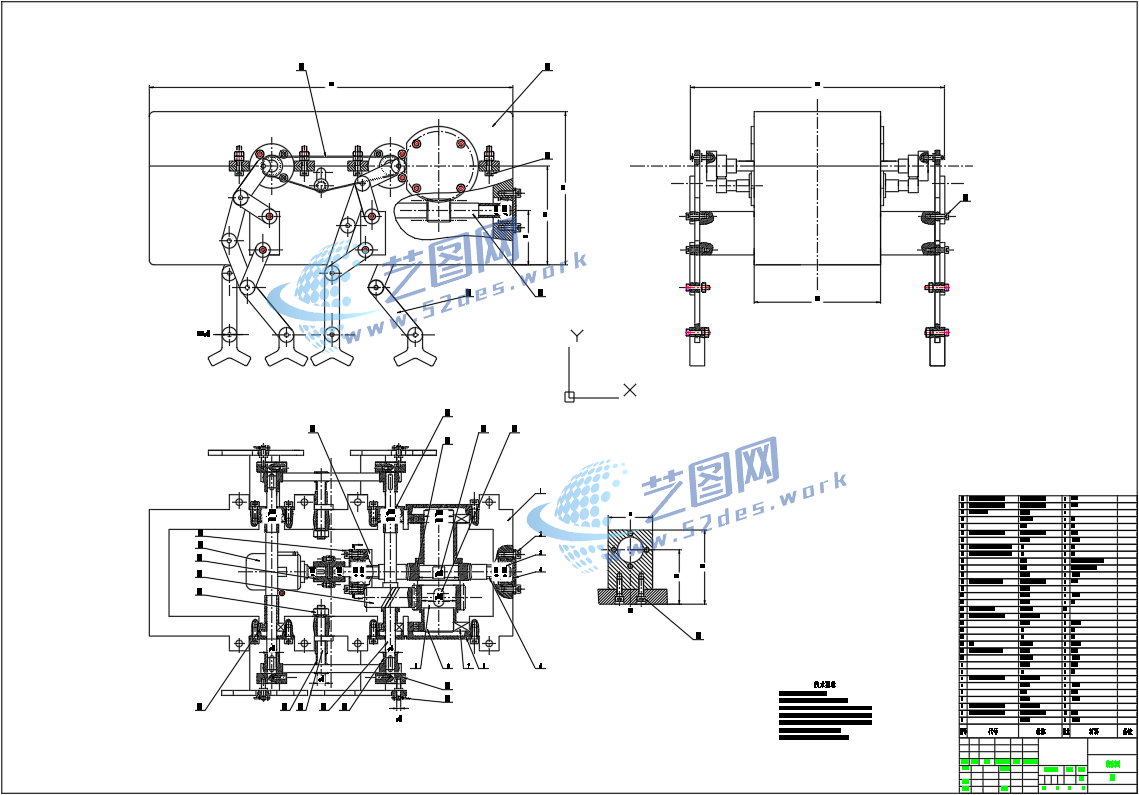 国标CAD图纸:机械结构设计装配图
国标CAD图纸:机械结构设计装配图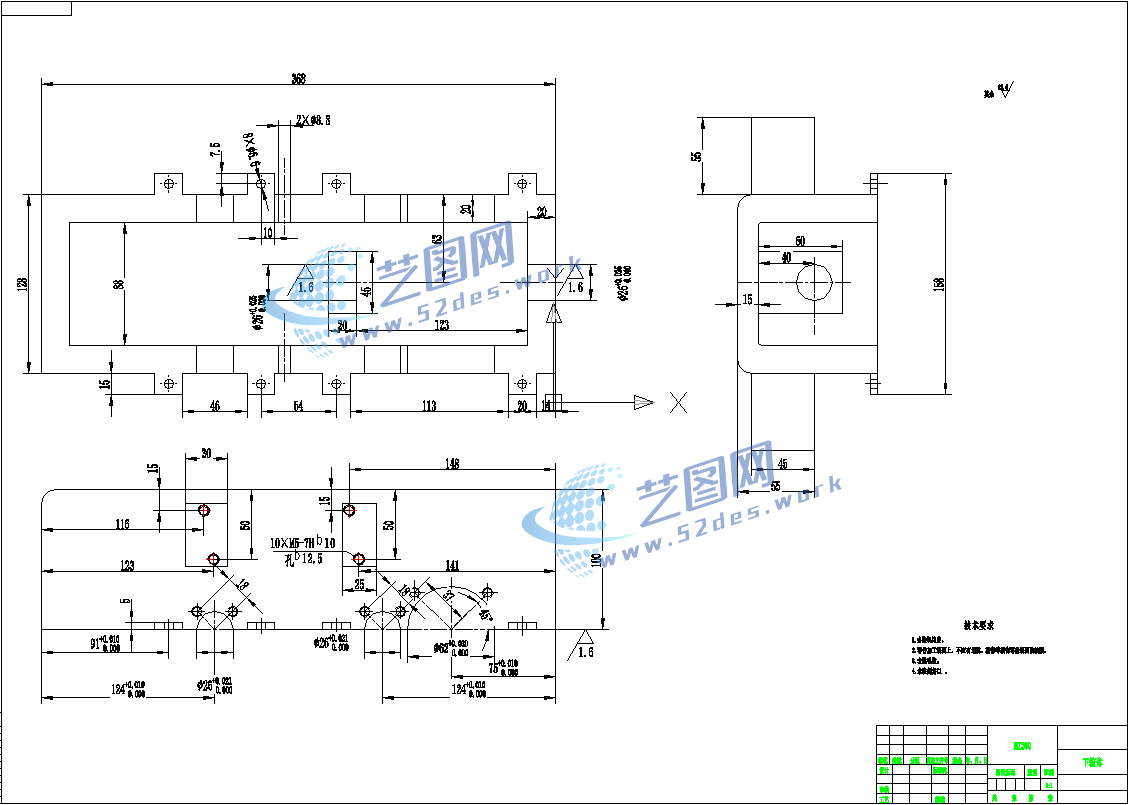 国标CAD图纸:零件图
国标CAD图纸:零件图 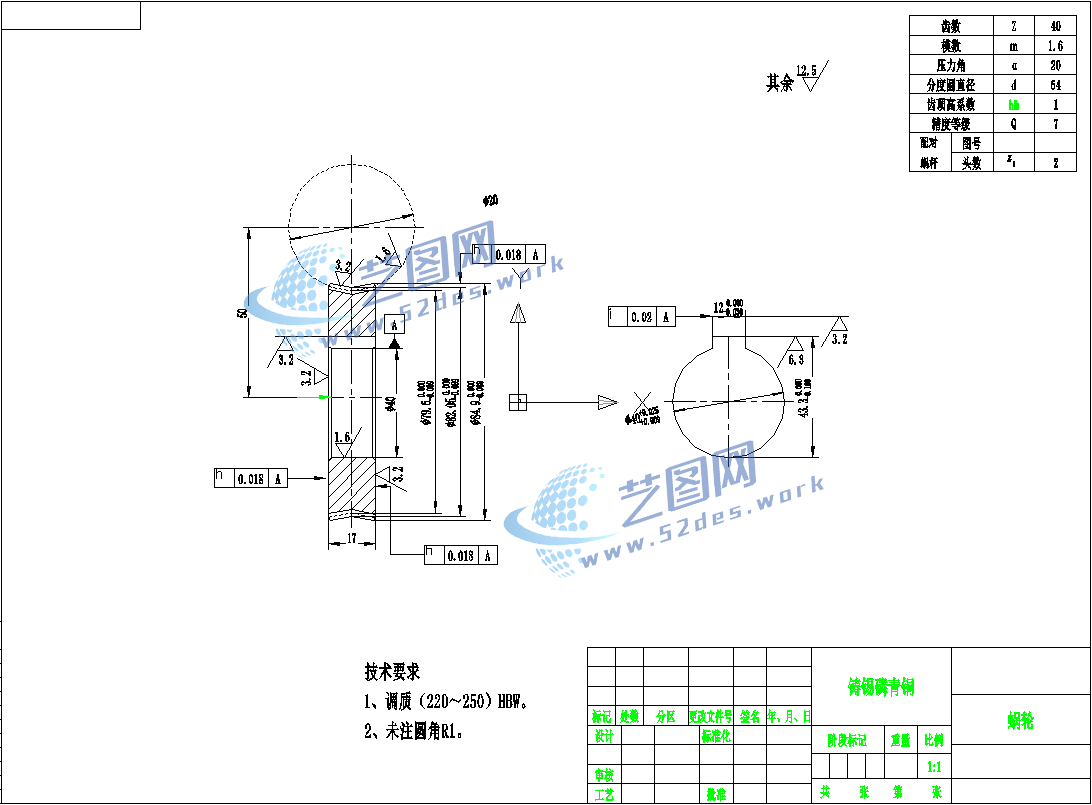 国标CAD图纸:零件图
国标CAD图纸:零件图 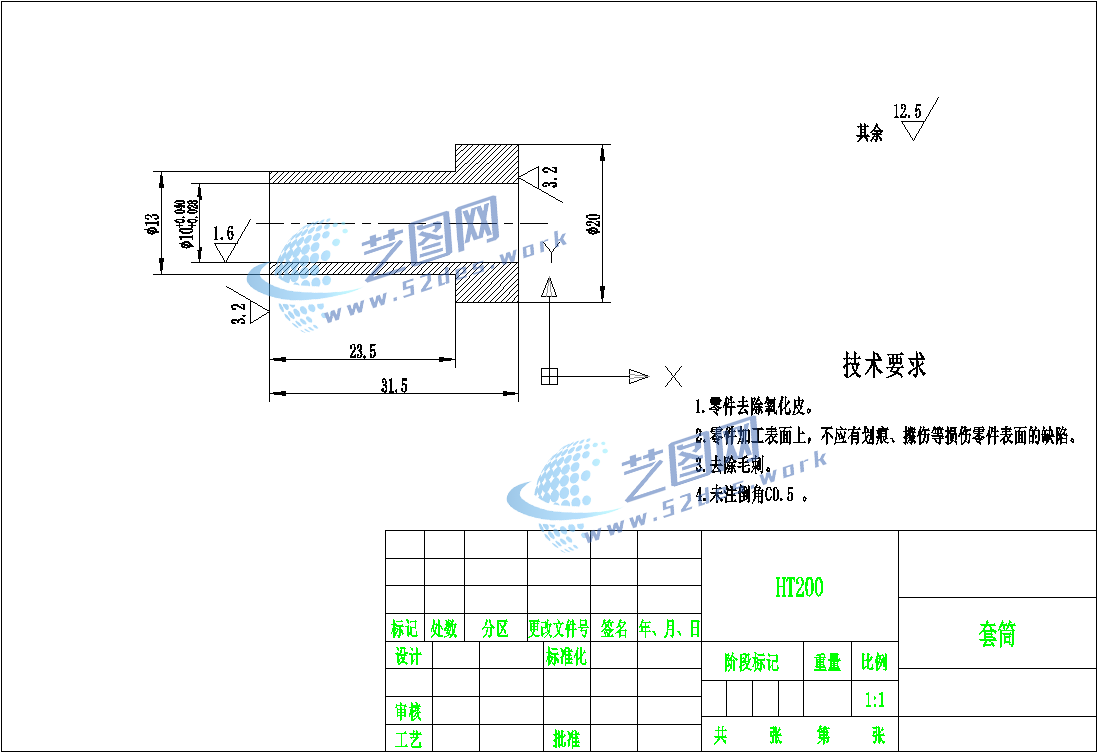 国标CAD图纸:零件图
国标CAD图纸:零件图 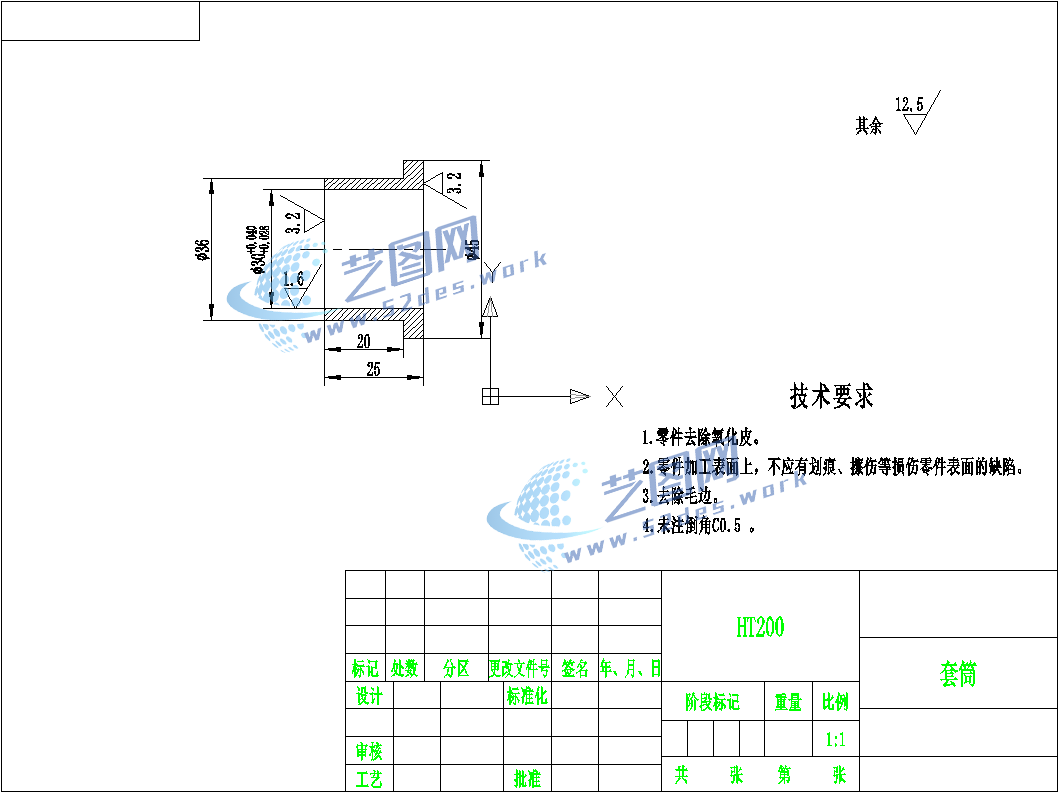 国标CAD图纸:零件图
国标CAD图纸:零件图 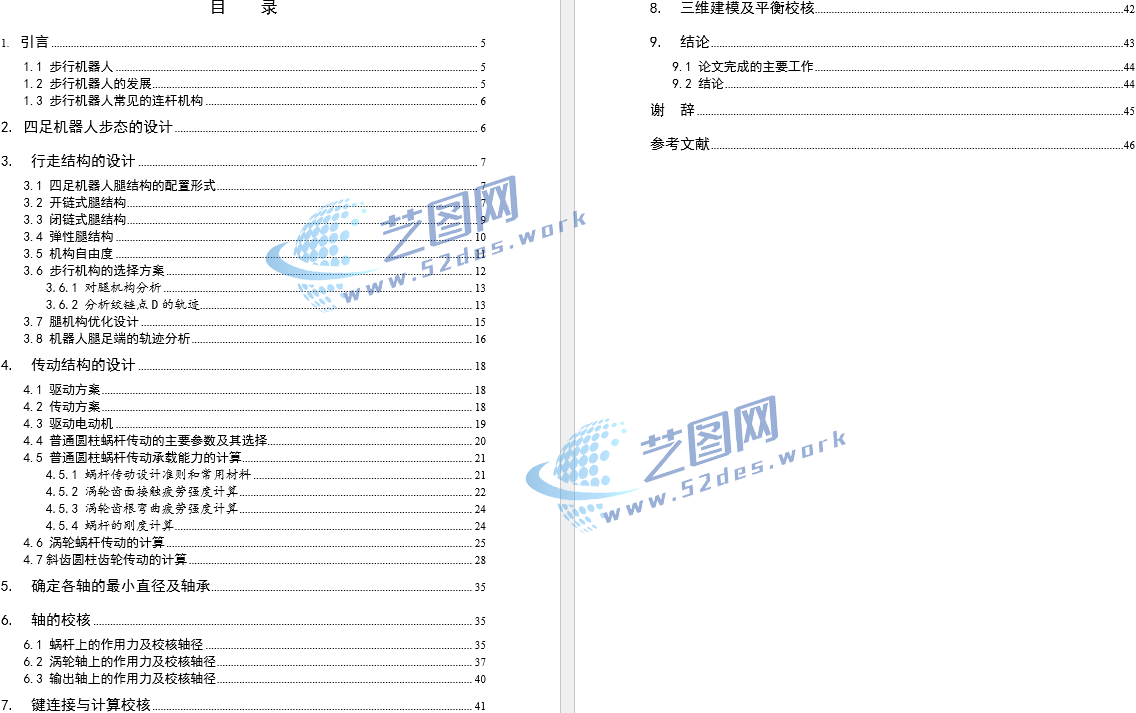 四足仿生机器人设计说明书目录
四足仿生机器人设计说明书目录 
四足机器人步行腿具有多个自由度, 落足点是离散的, 故能在足尖点可达域范围内灵活调整行走姿态, 并合理选择支撑点, 具有更高的避障和越障能力。对四足机器人的行走典型步态进行必要的分析比较,选择本次毕业设计四足机器人的步态——小跑步态,并对小跑步态进行设计。对腿关节结构是使用电动机驱动关节运动还是使用传统的连杆机构(四杆机构、五杆机构、六杆机构等)驱动关节运动进行比较,同时对机构的自由度进行分析,选择一个自由度的斯蒂芬森型机构作为四足机器人的行走结构,并且引用了已经运用成熟的腿机构。考虑到驱动系统的安装,选择一个电动机驱动四足机器人的行走机构,通过同步带驱动四条腿,减少了电动机的数目,减轻了四足机器人的负载,减少对腿关节运动的影响。本毕业设计通过涡轮蜗杆传动和齿轮传动,设计出了蜗杆二级减速器,第一级减速为蜗杆涡轮减速,第二级减速为齿轮减速。并对关键零部件进行必要计算和校核,从而得到四足机器人稳定步行所需要的速度,最终实现了四足机器人的步行。
