
 四足仿生机器人solidworks20版本模型源文件
四足仿生机器人solidworks20版本模型源文件 四足仿生机器人solidworks20版本、三维模型零件预览图
四足仿生机器人solidworks20版本、三维模型零件预览图 四足仿生机器人solidworks20版本三维装配模型
四足仿生机器人solidworks20版本三维装配模型  四足仿生机器人solidworks20版本三维装配模型
四足仿生机器人solidworks20版本三维装配模型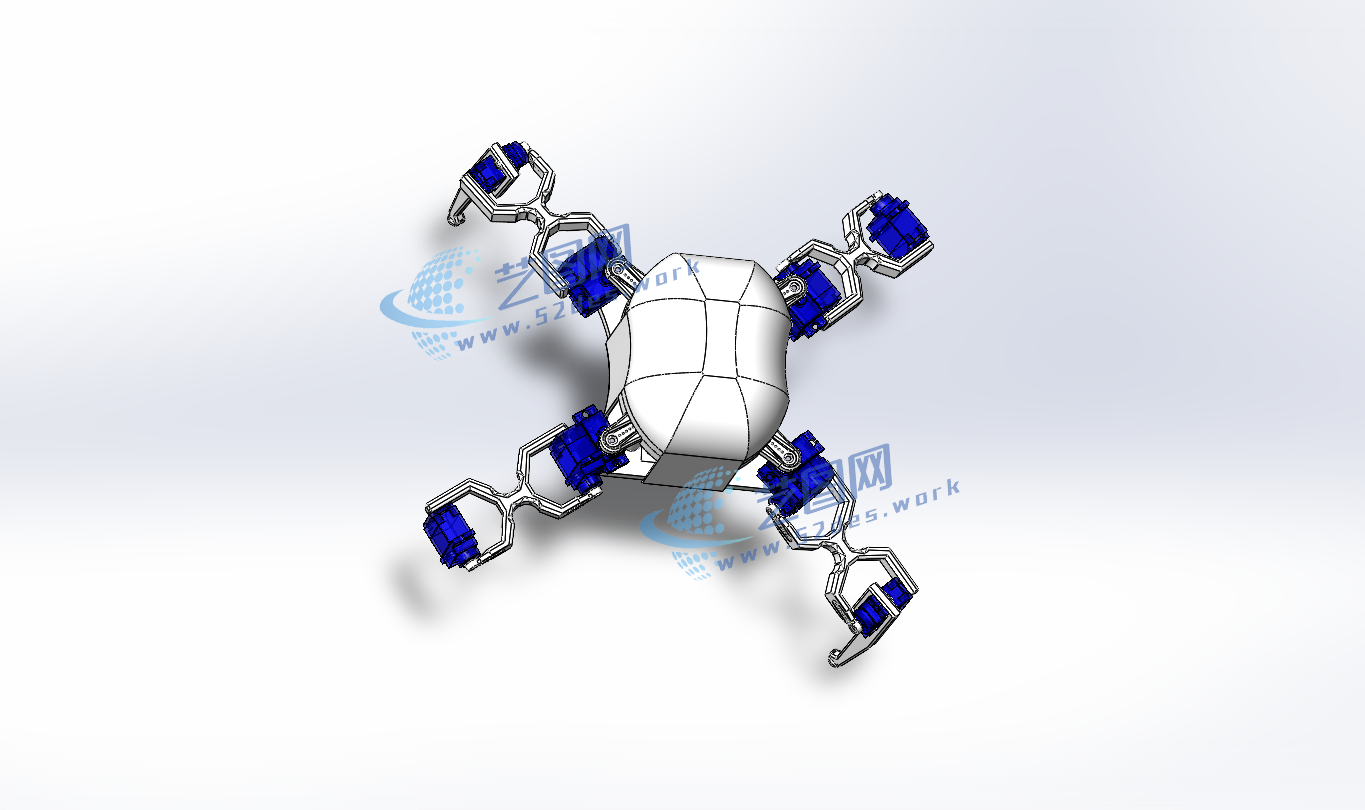 四足仿生机器人solidworks20版本三维装配模型
四足仿生机器人solidworks20版本三维装配模型 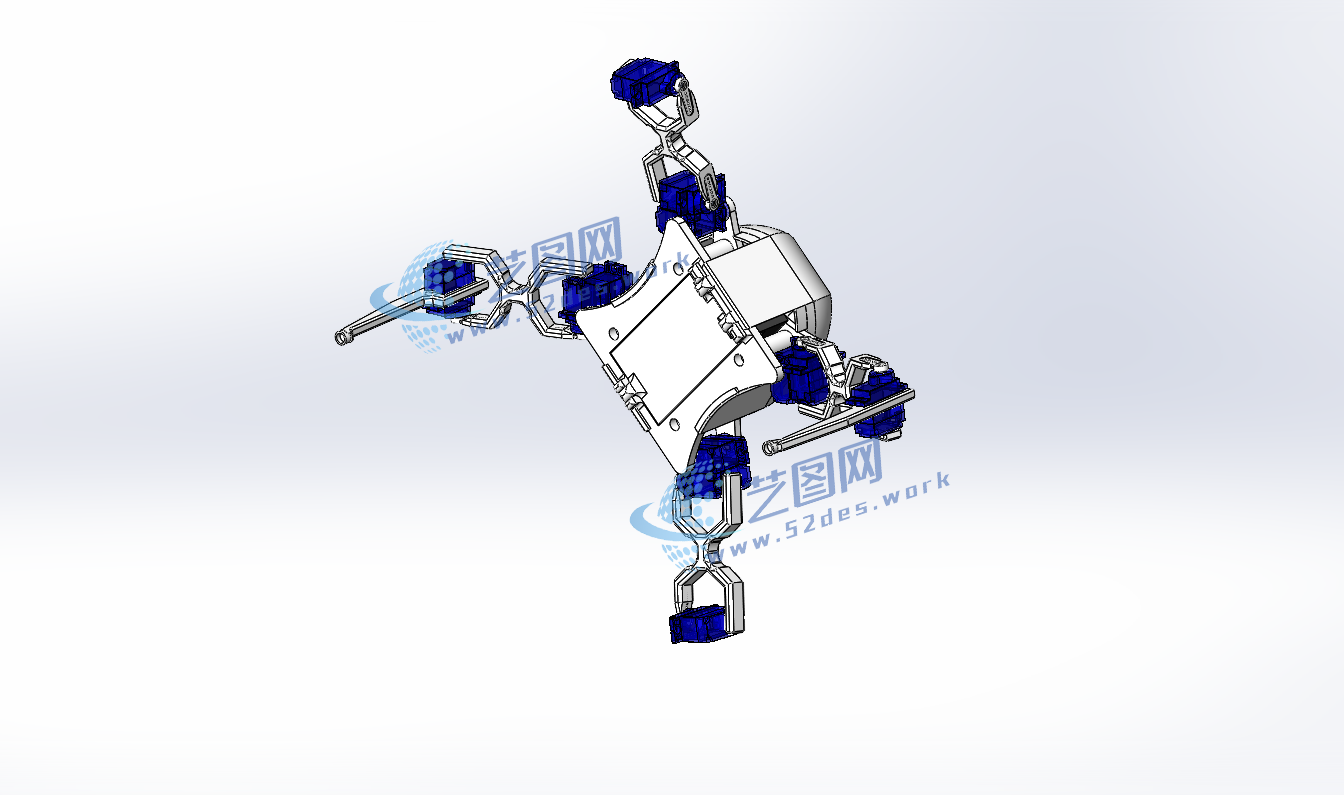
四足仿生机器人设计借鉴了生物动物的四足运动原理,旨在实现高度灵活的机动性。采用轻量化结构和先进的运动控制系统,机器人能够在复杂地形中自如行走。智能传感器和导航技术使其具备避障和自主导航能力。仿生设计不仅提高了机器人的稳定性和适应性,还使其在各种任务中表现出卓越性能,如救援、勘探和探测。这一四足仿生机器人设计融合了生物学和工程学的优势,为多领域应用提供了高效的解决方案。
