
 文件内容:CAD图纸、设计说明书
文件内容:CAD图纸、设计说明书  国标CAD图纸:机械结构设计装配图
国标CAD图纸:机械结构设计装配图  气动五自由度装卸机器人设计说明书目录
气动五自由度装卸机器人设计说明书目录 
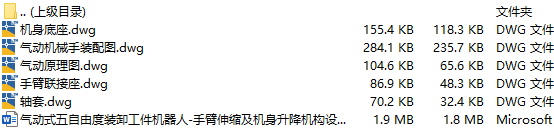
随着科学的发展,工业技术的进步,气动式装卸工件机器人在工件搬运过程中已成为必不可少的辅助搬运机械,是许多生产车间劳务工作过程中不可缺少的一部分。对于气动式装卸工件机器人在工业生产过程有着广泛的应用,它具有操作方便、动作连续性好、整体性好、结构简单、价格低廉等优点。它的一个显著优点是可操作性好,除了沿升降机构轴线方向的垂直运动外,还可以沿水平轴方向进行前进运动,这样不仅提高了工件在实际搬运过程中的工作效率,节约了人力和物力资源,而且使得气动式装卸工件机器人的功能消耗尽可能的降到了最低。但是理论上的气动式装卸工件机器人各组成部分的结构参数与实际工作情况下的结构参数难以避免会有一些差异,因此在设计过应尽可能的选择实际工作参数作为设计标准进行设计。设计者能够通过计算和选择几何参数的最优解、运动学和动力学参数等显著提高搬运设备的使用效率。但是实际工作过程中,目前市面上使用最广泛的人工搬运,这种搬运方式不仅耗时耗力而且加工成本高,这种类型的搬运方式已经严重不符合我国经济发展以及国民生产要求。
因此,本研究旨在设计一种适用于工件搬运的专用搬运机器人。这种气动式装卸工件机器人的使用者可以根据自己的实际工作情况自主调整搬运机器人机械的具体位置,整个装置结构简单使用方便;在设计过程中采用气压装备对机械臂姿态进行调整,价格低廉。根据实际工作情况选择合适的整体结构方案,根据方案设计选择合适的参数,并对关键零部件进行参数校核计算,最后对所设计的气动式装卸工件机器人机械进行工程图绘制。
